思岚科技“自主定位导航方案”为机器人帝国扩张铺路
2018-12-14 17:12:31爱云资讯
随着人工智能技术的发展和社会需求的变化,服务机器人市场需求强劲,将超越工业机器人的增速,成为机器人行业的下一个风口,而服务机器人区别于工业机器人的关键技术是,可以自主定位、自主路径规划和自主避障。
当我们身处某地,可以通过眼睛观察周边环境,如果想要去另一个地方,需判断最佳路径,当然也会同时避开障碍物,顺利到达目的地。那么对于移动机器人来说,如何实现这样的定位与导航呢?
以机器人的同步建图与定位技术为前提
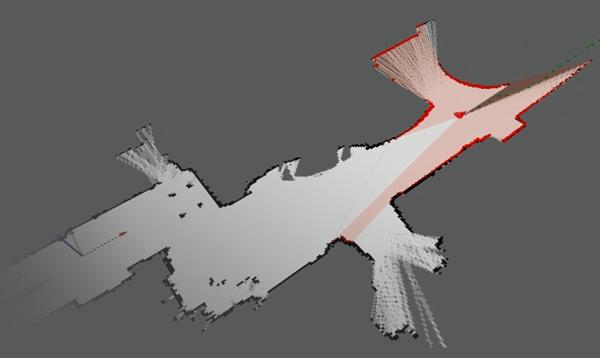
近年来,一种在确定自身位置的同时构造环境模型的方法,常被用来解决机器人定位与建图问题。这种被称为SLAM (Simultaneous Localization And Mapping)的方法,是移动机器人智能水平的最好体现,是否具备同步建图与定位的能力被普遍认为是机器人能否实现自主的关键前提条件。
目前,常用的SLAM技术主要分为两类,一类是基于视觉传感器的VSLAM,另一类是基于激光传感器的激光SLAM。
视觉SLAM专指利用摄像机、Kinect等深度像机来做室内导航和探索。到目前为止,室内的视觉SLAM仍处于研究阶段,远未到实际应用的程度,一方面,编写和使用视觉SLAM需要大量的专业知识,算法的实时性未达到实用要求,另一方面,视觉SLAM生成的地图(多数是点云)不能用来做机器人的路径规划,需要进一步探索和研究。
与视觉SLAM不同的是,激光SLAM技术已较为成熟,也是目前为止最稳定、可靠的高性能SLAM方式。
与其投入大量成本 不少公司更愿意选择打包解决方案
随着激光雷达价格进一步降低,核心传感器低成本化成为可能,不少服务机器人厂商也开始着手研发SLAM算法,但实际进展并不理想。我们采访了几家服务机器人厂商,起初他们选择采用ROS(Robot Opration System)实现定位与建图,虽然是开源系统,可以快速入门,但系统对于硬件要求较高,这无形中也提高了用户成本。此外,对于服务机器人来说,与用户开展实时互动是很重要的一项应用,而ROS自身的系统设计无法保证实时性,目前还不适合于真正的产品开发。在尝试采用ROS后,他们转而研发SLAM算法,但整体系统非常复杂,算法编程需要大量的专业知识积累,开发难度大,周期长。
对于服务机器人厂商来说,与其投入巨大的精力去研发SLAM算法,他们更愿意选择提供打包解决方案的公司,而自身只需专注于开发机器人上层结构,这样可以节约大量成本。
据了解,目前国内思岚科技在激光SLAM方面已有成熟的产品,利用其自主研发的激光雷达作为核心传感器,通过SLAMWARE内置的先进算法驱动,可在未知环境中实时提供定位。并构建最高达5cm分辨率的环境地图。在实现定位与建图外,同时采用D*动态即时路径规划算法,可自动搜索前往目标的最短路径并控制机器人行动。
纵观全球,能提供定位导航方案的公司并不多,思岚科技作为国内首屈一指的机器人定位导航方案提供商,在国内已占据70%以上的市场,目前优必选、新松等知名机器人企业均为思岚科技的合作伙伴,思岚科技的出现为机器人帝国的扩张铺平了道路。
在我国发布的《机器人产业发展规划(2016-2020年)》中,特别指出在智能型公共服务机器人中,“导航方式采用激光SLAM,最大移动速度0.6m/s,定位精度±100mm,具备自主行走、人机交互、讲解、导引等功能”。可见,激光SLAM的技术优越性,加上政策层面的鼓励与支持,未来的发展潜力可期。
- 思岚科技激光雷达赋能清洁机器人,助力商扫行业降本增效
- WAIC | 思岚科技三驾马车并驾齐驱,助力机器人自主行走
- 思岚科技荣获2022年度中国高科技 “智能制造高成长企业奖”
- 不被定义,思岚科技机器人底盘的百变扩展可能!
- 思岚科技:用智能机器人缓解人力缺口,我们有这些技术
- 思岚科技受邀参加“应急+智能机器人”产业促进交流活动,共讨“机器人+”发展
- 思岚科技:多技术协同,赋能消毒机器人
- 思岚科技亮相消费者科技及创新展 展示智能移动机器人解决方案
- 思岚科技成功入选“2020中国人工智能商业落地价值潜力100强”
- 思岚科技是如何攻克机器人智能行走难题 成为业内佼佼者
- 摆脱人为控制 思岚科技Apollo助力机器人智能行走
- 智能移动实力派 思岚科技参展CESA2019
- 思岚科技“自主定位导航方案”为机器人帝国扩张铺路
- 从世界人工智能大会,看思岚科技给机器人带来更多可能
- 从降低技术成本到量产交付,思岚科技为何能在定位导航领域站稳脚跟?
- 创新驱动发展,思岚科技引领机器人智能移动登陆上交会





