深兰科技AI智能扫路机为何在复杂城市环境下,不迷路?
2021-04-12 08:00:57爱云资讯761
日前,中国首个人工智能环卫智能化产业联盟正式成立。深兰科技作为联盟的理事长单位,将联合环卫清洁领域的产、学、研、用、资和服等单位,创新突破关键核心技术,加速建设人工智能环卫技术创新生态体系。

上海市经信委人工智能发展处处长石伯明为联盟理事长单位深兰科技授牌
成立大会上,“智星时空——AI闪耀环卫智能化”论坛,汇聚了众多环卫服务和设备行业第一线的专家,他们再次道出了业内的痛点,尤其是如今环卫道路保洁行业普遍存在的三个问题:一是招工难;二是劳动安全;三是能效一般。如果通过人工智能赋能传统行业,采取人机结合模式,将大幅降低一线从业人员重复体力工作。
可见,传统环卫向智能环卫升级已是大势所趋。深兰科技凭借在人工智能领域多年的积累,已成功开发并向市场推广了多款环卫产品,AI智能扫路机正是其中的明星产品之一。作为一款完整的自动驾驶产品,深兰科技AI智能扫路可以在高楼林立、树荫茂盛等复杂城市环境下实现无人化的清扫作业,且不会迷失道路,这完全取决于其中的关键技术——高精度定位。
基于多传感器紧耦合的高精度定位技术
1.什么是高精度定位?
定位,通俗地讲,就是解决“我在哪”的问题。具体来说,定位就是确定清扫车在某一参考坐标系下的位姿。而高精度定位则是L4级自动驾驶对定位的指标需求,即能到达厘米级的车道级定位。
众所周知,人开车是不需要高精度定位的,仅需要电子导航地图和米级的GPS定位,甚至根据记忆就能开车。那么,自动驾驶为何依赖高精定位呢?原因在于,人类司机具有很强的感知能力,可以降低对定位的需求。例如,人类仅靠双眼看到周围环境,就能确定自身车辆与周围道路的关系。
深兰科技AI智能扫路机
相比之下,自动驾驶车辆往往感知能力有限,需要将自身精准的位置信息结合高精度地图,来辅助实现对周围静态环境快速、精确的判断。同时,自动驾驶的规划和控制环节,也依赖实时、高精度的定位信息反馈,以便快速、精准地控制车辆的行为。
2.在复杂城市环境中作业
对定位技术的挑战
自动驾驶的定位方式,通常包括惯性定位、卫星定位以及环境匹配定位等。其中,卫星定位是依靠终端设备接收卫星发射的无线电信号,通过进行信号和信息处理来确定位置,借助定位基站的差分数据可以达到厘米级的定位,是一种最易获得、精度较高且无累积误差的定位方式。
然而,相比在开阔的高速公路上行驶的乘用车,在城市中作业的智能扫路机所面临的定位环境更为复杂。在城市的公园和景区作业时,智能扫路机往往需要穿梭于树林间、桥梁下等区域,卫星信号遮挡严重,定位大范围区域不可用;在高楼林立的道路辅道作业时,城市峡谷现象明显,卫星信号多径效应突出,定位精度下降。
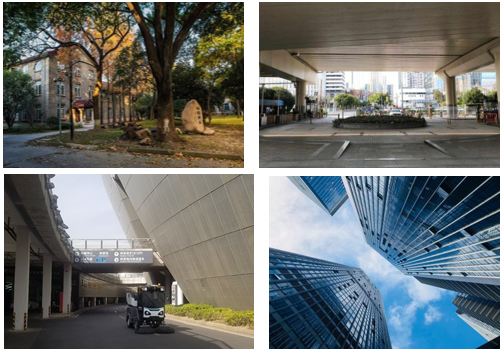
深兰科技AI智能扫路机作业的复杂城市环境
3.深兰科技AI智能扫路机
如何实现精确、可靠的定位
为保证清扫车能在城市环境中稳定、可靠地进行自动驾驶作业,需要融合惯性定位、卫星定位以及环境匹配定位等多种手段,实现定位方式的优劣互补。为此,深兰科技融合定位技术团队采用了基于惯性测量单元(IMU)、卫星导航(GNSS)、轮速传感器(WSS)、激光雷达(Lidar)等的多传感器融合定位方案,并根据前期大量场景的交付和技术迭代更新,提出了基于IMU/GNSS /WSS/Lidar等多传感器的紧耦合SLAM建图和定位技术,如下图4和图5所示。

深兰科技AI智能扫路机定位传感器布局
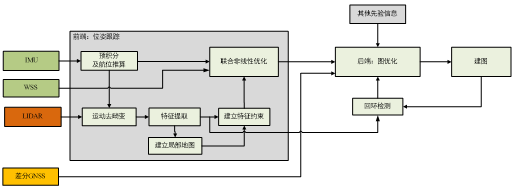
深兰科技AI智能扫路机多传感器紧耦合SLAM建图的方案框图
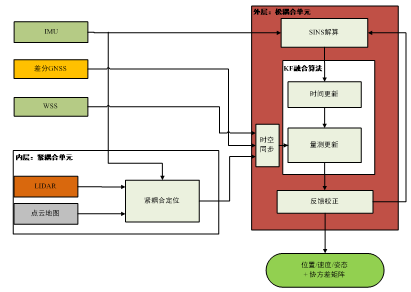
深兰科技AI智能扫路机多传感器紧耦合定位的方案框图
与松耦合SLAM相比,紧耦合SLAM具有高精度、高可靠性的优点,但同时存在工程实现难度大的问题。因此,国内自动驾驶领域的同行,前期多采用松耦合的方案。为保证AI智能扫路机自动驾驶作业场景和长期运行稳定性,深兰科技融合定位团队经过技术攻关,克服了多传感器精确时间同步、多传感器外参精确标定,以及基于优化的紧耦合算法等诸多紧耦合SLAM的关键难题,最终在深兰科技AI智能扫路机上成功进行了紧耦合SLAM建图和定位的测试验证。
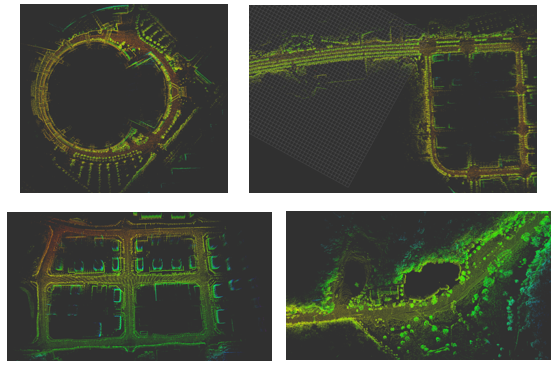
深兰科技AI智能扫路机已交付运营的部分场地紧耦合建图效果展示
目前,紧耦合建图和定位模块已经作为标准模块部署到了深兰科技AI智能扫路机自动驾驶系统中。自紧耦合建图和定位模块部署以来,有力支撑了深兰科技AI智能扫路机在北京、济南、烟台、上海、常州、昆山、重庆、深圳、天津、鞍山等多地各种复杂场景下的自动驾驶落地运营。
相关文章
- “磨”力无界,”鲨”出净途,深兰科技将推出商用清洁机器人新品
- 深兰科技携三款AI机器人产品参加2024荷兰阿姆斯特丹国际清洁展
- 深兰科技·科学院黄智生教授荣获“第18届2023·爱心奖”
- 6项世界第一!深兰科技在RANLP 2023大赛上共斩获11项大奖
- 王小慧艺术馆联手深兰科技,推出中国第一个AIGC绘本创造营
- 再扩海外市场 深兰科技智能割草机器人首秀北美清洁展
- AI技术服务千行百业,深兰科技工业检测技术推动产业数智化转型
- 与时间赛跑!深兰科技“特殊”医疗队穿梭上海二十余所高校核酸采样
- 助推“专精特新”发展,兴业银行与深兰科技签署合作协议
- 日检近十万人次,深兰科技移动式实验室启动检测
- 上海人社部门携手深兰科技,共建首个人工智能创新实训中心
- 武汉封城2周年 | 深兰科技猫头鹰助力抗疫,累计服务超1亿人次
- 深耕技术研发与落地,深兰科技荣获“2021年度人工智能行业领军企业“
- “持证”上路三年 深兰科技熊猫智能公交累计行驶里程超20万公里
- 连续三年,深兰科技获评中国人工智能领航企业
- ICCV 2021 深兰科技征战四赛道,一举拿下三项世界冠军