FB嵌入式人工智能平台发布,单目3D姿态估计新方法,全球人工智能发展报告
2019-04-09 12:47:15爱云资讯
AI Scholar Weekly是AI领域的学术专栏,致力于为你带来最新潮、最全面、最深度的AI学术概览,一网打尽每周AI学术的前沿资讯,文末还会不定期更新AI黑镜系列小故事。
周一更新,做AI科研,每周从这一篇开始就够啦!
嵌入式人工智能研究平台Habitat
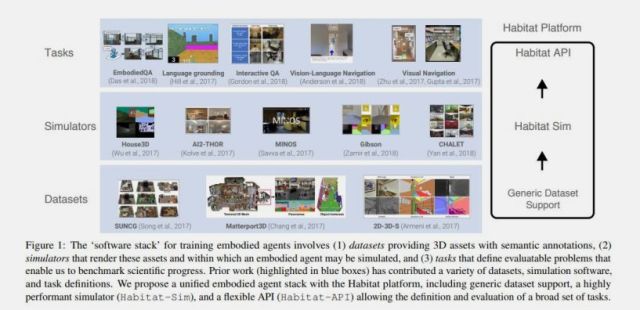
来自Facebook人工智能研究中心、佐治亚理工学院、Facebook现实实验室、西蒙弗雷泽大学、英特尔实验室和加州大学伯克利分校的研究人员展示了最有趣的机器人研究进展之一——Habitat。
Habitat是一个新的嵌入式人工智能研究平台。可以把它想象成一个机器人的世界,在这个世界里,机器人的训练采用高效、逼真的3D模拟形式,之后它们就可以被转移到现实世界中去。
Habitat包括:
1. 一个高性能的3D模拟器,具有可配置的代理、传感器和通用的3D处理功能,内置了对Matterport3D、SUNCG和Gibson数据集的支持。
2. Habitat API——一个集成的高级库,允许用户在不同的3D场景数据集中使用不同的方法训练和基准测试人形智能代理。
3. Habitat挑战——以视觉导航为基准并以推进目标为导向的努力。
潜在应用及影响
Habitat是一个范例的转变。它为人形智能代理提供了一个在现实环境中行动和学习的环境,将加速对人形人工智能的研究。
这并不是说数据表已经完全转变了,但尽管数据集在计算机视觉和自然语言处理过程中起到了重要的推动作用,但功能丰富的模拟器可能很快就会开始发挥作用。当然,这还有很长的路要走,只有人工智能研究社区的全面参与与投入才能取得成功。
Habitat平台是开源的,详细信息:
https://aihabitat.org/
原文:
https://arxiv.org/abs/1904.01201
语义KITTI数据集
最近,一组研究人员开发了一个新的大规模语义KITTI数据集,该数据集在点云序列的点向注释方面具有特殊的规模。
该数据集是基于KITTI基准的里程测量数据集,包含城市内部交通、居民区、公路场景和乡村道路,但不影响原始的里程测量基准。
新数据集也是同类数据中最大的,包括23201个用于训练、20351个用于测试的完整3D扫描。为了开发数据集,研究人员避免使用边界框或KITTI数据集可用的注释来确保标签的准确性和一致性。
该数据集已在PointNet、PointNet++、切线卷积、SPLATNet、超点图和SqueezeSeg等六种点云语义分割体系结构上进行了评估和测试。测试结果表明,现有的点云语义分割模型无法匹配数据集的大小和复杂度。
潜在用途及影响
语义KITTI数据集提供了一系列不同的基线实验,用于使用单个扫描、多个扫描以及语义场景完成任务的语义分割。它还致力于推动计算机视觉和自动驾驶机器人应用的发展。
利用卷积变分自编码器进行单目3D姿态估计
最近的研究试图通过一个深层条件变分自动编码器来解决2D到3D提升的固有困难。研究人员提出了一种基于深度学习的生成模型,以估计的2D姿态为条件,合成不同的3D姿态样本。通过这样做,他们解决了从2d到3d提升过程中遇到的模糊性。
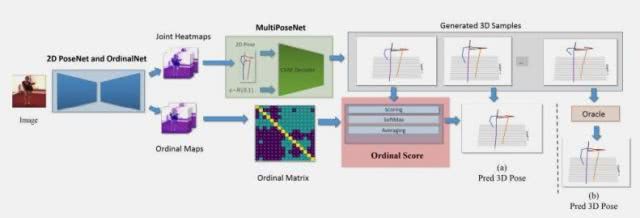
这是首次将深度条件变分自编码器(CVAE)应用于3D人体姿态估计。研究人员使用两种技术来预测最终的3D姿势,包括有序排列和甲骨文。从RGB图像中得到关节序数关系,并展示了它们对使用oracle报告的3D姿态样本进行排序的用法。
该方法允许三维姿态建模,并提供了绘制不同的三维样本的灵活性,从而在Human3.6M和Human-Eva基准数据集上产生了有竞争力的结果。
潜在用途及影响
研究人员是否终于解决了单目三维姿态估计的长期难题?这项研究让我的思绪回到了2014年GANs发现的时代。这是CVAE首次应用于单眼3D姿态估计。
新框架在两个基准数据集上获得了具有竞争力的结果。此外,该模型可以在没有配对3D监督的情况下进行训练,仍然可以产生有竞争力的结果。我认为这个新模型是人工智能研究社区愿意深入研究的东西,能够帮助推动3D姿态估计的进步。
模仿学习的生成式前代模型
借鉴已有的生成模型,研究人员提出了新的模仿学习生成前代模型(GPRIL),该模型对多步生成前代分布进行建模,实现状态-动作分布匹配。
新方法基于一个概念:即,使用专家演示和环境动态增强训练数据集,这些数据集预先提供给人形人工智能,并且只能通过交互进行观察。状态-动作对使得人形人工智能能够有效地模仿专家,并通过纠正行为和减少错误进行训练。

通过这种方式,该方法使得人形人工智能可以仅使用少数专家演示和与周围环境的自监督交互来学习鲁棒性的策略。GPRIL在两个模拟机器人操作任务上达到或优于现有的仿真模型,并在真实机器人上显示了相当高的样本效率。
潜在用途及影响
GPRIL可以帮助我们解决真实世界中训练人形人工智能的样本效率低下或计算可行性方面的挑战。此外,它还有潜力使自主技术训练过程更安全、快速。
高效的大型机器人网络规划与协调
来自中国的研究人员进行研究时,发现大型机器人网络仍然存在着一些经常发生的问题。在由大量机器人组成的网络中,如果它们缺乏密度分布平衡,就会导致交通拥挤、冲撞和停顿。
作为这些问题的解决方案,研究人员提出了一种用于仓储和物流应用的分区任务规划和行动协调方法。在任务规划方面,对仓库环境进行了划分,并使用一个交通热力图实现了机器人的密度分布。
然后,他们应用近邻任务分配技术,将特定的任务分配给最近的自由机器人,并在拓扑图中进行高级路径规划。所有行动都能保证交通流动的平衡,并使实时状态呈现优异表现。
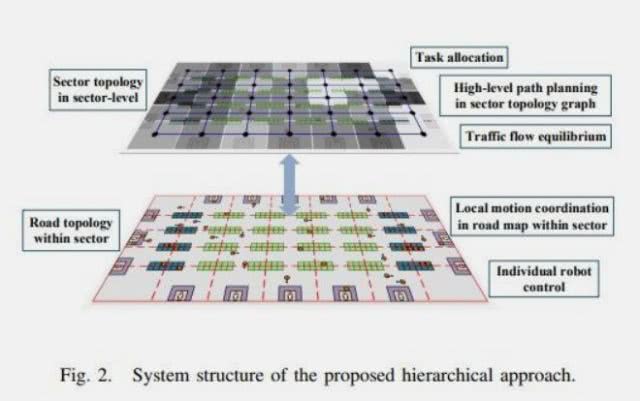
另一方面,该方法还通过在每个分区中的本地协作算法和用于协调成对相邻分区的通道预留方法来实现行动协调。在此基础上,提出了一种在线循环规划机制,提高了模型对机器人运动延迟和通信故障的容忍度。最后,每个机器人对其规划的道路路径实施控制追踪机制,以避免可能发生的碰撞。
潜在用途及影响
我非常喜欢这个研究成果。这个方法具有很大的潜力,可以消除拥有1000个机器人以上的仓库中大型机器人网络的主要通信和运动不确定性问题。我们正在寻找更有效、更高效、更稳定的未来仓库型机器人应用。
- AMD Embedded+ 将嵌入式处理器与自适应SoC相结合,加速边缘AI应用上市进程
- 雅特力AT32 Workbench图形化代码生成工具,简化嵌入式开发利器
- 适用于恶劣环境的IP66防水紧凑型无风扇嵌入式计算平台
- 嵌入式冰箱引爆人潮,伽洛夫GRF惊艳2023广州设计周
- 打造嵌入式数字供应链金融 金蝶征信入选京东科技最佳合作伙伴
- 以场景穿越周期!三翼鸟给出嵌入式厨居最佳答案
- 中移物联OneOS-GJB通过军用嵌入式操作系统测评
- 嵌入式OS设计策略解读|忆联企业级SSD高可靠、高性能的实现方法
- 中移物联OneOS亮相上海国际嵌入式展
- 容声冰箱再掀“嵌入式”新浪潮,双净·平嵌508新品冰箱即将面世
- 嵌入式成行业新风口,TCL薄嵌冰箱T9抢占先机,稳坐市场第一
- 铠侠推出第二代UFS 4.0嵌入式闪存设备
- 嵌入式冰箱消费大潮来袭,618冰箱选购思路帮你整理好了!
- 从AWE看容声冰箱“嵌入式”的赛道之光
- 博世家电荣膺AWE 2023艾普兰多个大奖,博世嵌入式净饮机问鼎金奖
- 嵌入式冰箱持续走热 容声双净无边界506冰箱带来至臻美感