微美全息开发基于神经网络的无人机控制系统引领技术革新
2024-01-03 12:40:33AI云资讯2969
在现代科技快速发展的背景下,无人机技术逐渐成为民用和商业领域中车载工具。然而,随着无人机应用领域的扩展,系统在执行任务时可能面临多变的气象条件、复杂的区域、以及各种不可替代的环境预知的环境因素。这使得无人机系统需要更加智能和监控的控制系统。传统的线性控制系统在处理非线性和复杂动态系统时存在着短板,无人机系统的飞行动力学通常是非线性的,因此需要一种能够有效处理此类动态系统的先进控制方法。此外,无人机系统面临的挑战也随之增加,这些挑战包括不断变化的环境、未知噪声、系统不确定性和复杂的动态问题,这些因素的存在增加了系统的不确定性,需要一个能够实时适应和调整的控制系统。据悉,微美全息(NASDAQ:WIMI)一直在此背景下希望开发一种创新的智能控制系统,以解决这些不确定性的问题提高无人机的控制准确性。
随着无人机技术的逐渐成熟,市场对于更加智能、更加激烈的系统需求迫切增长。人工神经网络作为一种先进的非线性建模和控制方法,在处理复杂、非线性系统方面表现出色。WIMI微美全息意识针对这一发展趋势,将人工神经网络引入无人机控制系统,以提高系统的性能和配件。
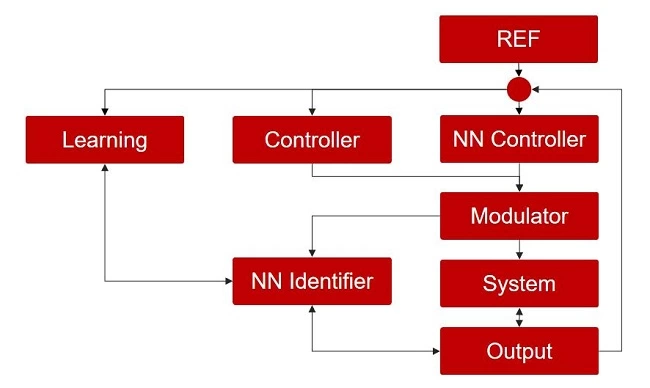
首先,为了实现对无人机系统中未知动态和不确定性的实时识别,WIMI微美全息开发了一种基于神经网络的标识符。该标识符的任务是通过监测系统输入和输出之间的关系,动态识别地捕捉和学习系统的未知特性。使用适当的神经网络结构,例如循环神经网络(RNN)或长短时记忆网络(LSTM),能够建立一个能够持续迭代和更新的标识符,从而提高对系统动态的逼近精度。再通过将标识符捕获到的信息与已知的系统动态相结合,生成了一个基于神经网络的系统模型。这个模型可以是线性的或非线性的,取决于具体系统的性质。 ,结合线性或非线性控制器,生成了基于神经网络的控制器。这个控制器的设计考虑了系统模型的动态变化,以实现对系统的实时调整,从而保持其在不确定环境下的稳定性性和性能。
此外,WIMI微美全息为了确保在线训练阶段系统的稳定性,引入了线性或非线性控制器。这些控制器在学习过程中充当保护层,防止系统因为未知的动态变化而导致不稳定行为的。在在线训练过程中中,通过将这些稳定性控制器与基于神经网络的控制器良好地工作,能够在学习的同时保持系统的安全运行,从而最大程度地减少不确定性对系统性能的影响。
为了评估所提出的智能控制系统的性能,WIMI微美全息进行了大量的计算机仿真实验。以系统不确定性和干扰动的基准无人机为对象,对系统的稳定性和控制性能进行了全面的评估通过模拟飞行不同的环境和任务场景,验证了该系统在高效复杂环境、噪声和干扰时的鲁棒性和鲁棒性。
WIMI微美全息基于人工神经网络的无人机智能控制系统代表了在无人机技术领域的一次巨大飞跃。首先,通过引入基于神经网络的强制标识符,系统能够实时识别和近无人机系统中的未知特性,为后续控制器的设计提供了精准的基础。
这一创新技术的开发,为无人机系统的应用领域带来了新的前景。通过大量的计算机仿真验证,该系统在复杂环境、噪声和干扰下表现出色,成功实现了无人机的应用稳定飞行和控制。这不仅使无人机在民用和商业领域的高效应用可靠,同时也为未来的科技发展奠定了坚实的基础。WIMI微美全息的技术突破不仅使无人机系统在复杂环境下的适应能力,也为科技领域带来了启示,将在未来的智能系统发展中发挥关键作用。
显然,这项技术不仅仅是针对无人机技术的重要贡献,更是对整个人工智能与航空领域深度融合的滤波器。未来,这一技术将推动无人机技术的不断发展和智能系统的推进开拓新的道路,WIMI微美全息将继续致力于推动科技的不断进步,为构建更加智能和可靠的未来做出更大的贡献。
相关文章
- 英伟达抢建物理AI算力工厂,微美全息(WIMI.US)锚定芯片赛道掀起GPU热潮!
- 净利3.47亿元!微美全息(NASDAQ:WIMI)2025年经营业绩出炉
- 2026 AI眼镜市场“奇点“已至,微软/苹果/微美全息领衔卡位剑指下一代入口争夺
- 亮眼成绩单!微美全息(Nasdaq:WIMI)2025年净利润3.47亿元
- 谷歌Beam抢滩多人会议全息赛道,微美全息以AI+5G解锁虚实融合视觉新想象
- 重磅!微美全息(WIMI.US)2025年实现净利润3.47亿元!
- AI驱动量子计算风口已至!英伟达/微美全息抢占高地锁定量子生态席位!
- 微美全息(NASDAQ:WIMI)披露2025年度业绩:净利润3.47亿元!
- 业绩官宣|微美全息2025年净利润达3.47亿元
- 苹果提速研发AI眼镜,高通/微美全息构建多维触达矩阵抢占穿戴消费风潮!
- 2026智能眼镜“百镜争鸣”,谷歌/阿里/微美全息引领AR/XR产业全面升级
- OpenAI 新模型密集更新,Meta/微美全息强化布局AI核心需求迎爆发增长!
- 脑机接口开启“数字桥梁”新局,微美全息(WIMI.US)多路创新探索并进风头正劲!
- 谷歌首款AI眼镜即将呼之欲出,微美全息(WIMI.US)扎实推进AI+AR生态落地
- 亚马逊250亿加盟豪掷Anthropic,微美全息深耕Agent与AIGC赛道拓版图!
- AI芯片竞争战火升级,特斯拉/Meta/微美全息自研硬核实力发起行业冲锋革命!
人工智能企业
更多>>

人工智能硬件
更多>>人工智能产业
更多>>人工智能技术
更多>>- 自变量机器人王昊:训练世界模型需付出“时间税”,解决模态对齐是当务之急
- 腾讯发布CodeBuddy Security,用AI Agent实现更高效的代码审计
- Twinkle x昇腾,率先实现Deepseek-V4系列模型高效训练
- 高德发布鸿蒙首个生成式 UI 开源框架 AGenUI,告别传统 UI 开发模式
- 发布即适配| 天数智芯全力支持腾讯混元Hy3 preview 开源落地,共推国内大模型产业普惠
- Seedance 2.0面向企业公测,豆包大模型日均Token使用量突破120万亿
- 端到端OCR模型第一!百度千帆Qianfan-OCR正式发布
- 云知声Unisound U1-OCR大模型发布!首个工业级文档智能基础大模型,开启OCR 3.0时代


