Nullmax纽劢感知技术再获国际认可,创新目标检测论文入选ECCV 2024
2024-07-05 15:57:30AI云资讯54862
当地时间7月1日,备受瞩目的欧洲计算机视觉国际会议(ECCV)2024正式公布了其论文录用结果,Nullmax纽劢感知团队提交的《SimPB: A Single Model for 2D and 3D Object Detection from Multiple Cameras》,成功入选这一计算机视觉领域的全球顶级盛会。顶会论文显现了Nullmax纽劢在视觉感知技术领域的卓越实力,也代表着其研究成果再次获得国际科研界的权威认可。
ECCV:汇聚全球顶尖智慧,严苛标准铸就辉煌
作为计算机视觉领域的三大顶级会议之一,ECCV由欧洲计算机视觉协会(ECVA)每两年举办一次,是学术界与工业界交流最新研究成果的重要平台。会议以其高水准的论文质量和严苛的录用标准著称,吸引了全球范围内顶尖实验室和研究所的积极参与。此次Nullmax纽劢的论文入选,无疑是对其创新性和学术价值的高度肯定。
SimPB:革新传统,提出多相机目标检测新方法
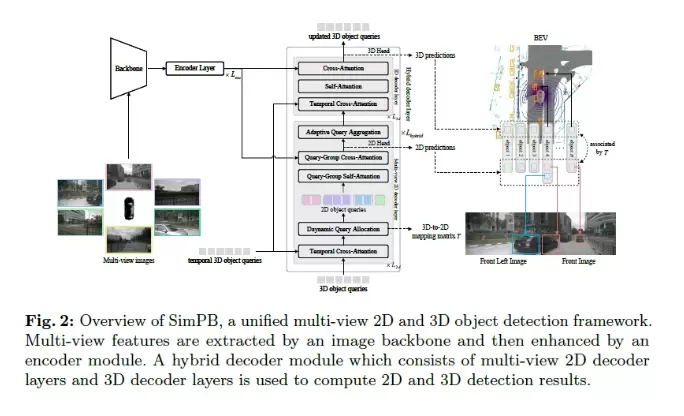
在《SimPB: A Single Model for 2D and 3D Object Detection from Multiple Cameras》一文中,Nullmax纽劢团队提出了一种新颖的目标检测模型——SimPB。该模型以端到端、单阶段的方式,实现了从多相机数据中同时检测透视视图中的2D目标和BEV空间中的3D目标,并创新地建立了2D与3D检测框之间的自动关联机制。通过循环迭代的方式,SimPB持续交互2D和3D检测结果,充分发挥了图像空间和BEV空间的各自优势,从而在多相机配置下实现了卓越的2D和3D检测效果。
视觉感知引领自动驾驶创新应用
对于自动驾驶而言,精准高效的视觉感知是确保行车安全、提升驾驶体验的关键,尤其是深入运用2D和3D检测能力,可以有效解决自动驾驶中常见的漏检、误检及感知距离受限等问题,为自动驾驶技术的应用注入带来进一步的提升。特别是在高阶智能驾驶功能和多相机配置日益普及的今天,视觉感知的应用价值更加凸显。
值得一提的是,今年Nullmax纽劢在视觉感知领域的另一项研究成果《Enhancing 3D Object Detection with 2D Detection-Guided Query Anchors》也成功入选了另一计算机视觉顶会CVPR 2024。这一系列荣誉的获得,证明了Nullmax在自动驾驶视觉感知技术方面的深厚积累和实力。
相关文章
- Nullmax纽劢2024技术盛会:Nullmax Intelligence推动全场景应用落地
- Nullmax纽劢感知技术再获国际认可,创新目标检测论文入选ECCV 2024
- Nullmax纽劢3D目标检测新研究成果入选CVPR 2024!
- Nullmax纽劢自动驾驶测试「双商」在线:技术深度与AI智能并驾齐驱
- Nullmax纽劢荣膺“投中榜”TOP10,自动驾驶技术引领市场新潮流
- 2024北京车展见证Nullmax纽劢技术突破,平台化方案MaxDrive组队亮相
- Nullmax纽劢携领先智驾技术登场,助力全球自动驾驶产业发展
- Nullmax纽劢于全球开发者先锋大会分享大模型自动驾驶创新思考
- 起底Nullmax:又一家从硅谷回来的自动驾驶公司
人工智能企业
更多>>

人工智能硬件
更多>>人工智能产业
更多>>人工智能技术
更多>>- 自变量机器人王昊:训练世界模型需付出“时间税”,解决模态对齐是当务之急
- 腾讯发布CodeBuddy Security,用AI Agent实现更高效的代码审计
- Twinkle x昇腾,率先实现Deepseek-V4系列模型高效训练
- 高德发布鸿蒙首个生成式 UI 开源框架 AGenUI,告别传统 UI 开发模式
- 发布即适配| 天数智芯全力支持腾讯混元Hy3 preview 开源落地,共推国内大模型产业普惠
- Seedance 2.0面向企业公测,豆包大模型日均Token使用量突破120万亿
- 端到端OCR模型第一!百度千帆Qianfan-OCR正式发布
- 云知声Unisound U1-OCR大模型发布!首个工业级文档智能基础大模型,开启OCR 3.0时代


