瑞士联邦理工学院开发出双模态机械臂,机械手可以和臂分离 扩大抓取范围
2024/09/28 07:04AI云资讯32025
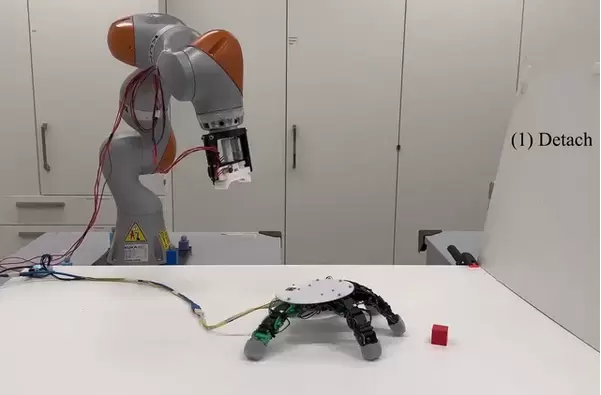
(AI云资讯消息)瑞士洛桑联邦理工学院(EPFL)的研究人员开发了一种可移动的手,它可以从机器臂上分离并自行爬行,以抓取物体,从而扩大机器人手臂的活动范围。这项研究最近在国际机器人与自动化大会(ICRA)上公布,并发表在《IEEE光谱》杂志上。
由于力量和速度,机器人手臂通常被永久地固定在地板或其他结构上以增加稳定性,这限制了其抓取范围。瑞士洛桑联邦理工学院(EPFL)学习算法与系统实验室(LASA)的研究目标是开发一种双模态机器人手,以扩大其抓取能力,包括偶尔与机器人臂分离的能力。

机器人手通常只有一个目标:抓住东西。为了设计出能够像电影《亚当斯一家》中的小东西一样自主爬行的机器人手,研究人员利用遗传算法(依赖于自然选择和进化等生物技巧)和MuJoCo物理模拟器生成并优化了基本设计,并通过迭代测试了其实用性。
该算法和模拟帮助研究人员确定了所需的关节手指数量和位置,结果发现需要五个关节手指,其布局与人类手部类似。该机器人手腕处还使用了磁性连接器,使其能够自主地与手臂连接和断开。

机械臂的手指可以向两个方向弯曲,这样它可以用其中一些手指拿起物体,而其余的则作为小小的腿来使用。这种设计在将手安装在机器人手臂上时也扩大了其用途。它可以同时拿起多个物体,而不必扭曲手臂来重新定位未使用的手指。
这只手的尺寸也比像波士顿动力公司(Boston Dynamics)的Spot机器狗小得多。Spot机器狗可以自由地用四条腿移动,已经配备了自己的机械臂和抓取器,但如果有一个可以独立操作的灵活的手,它就能更好地探索或分析Spot机器狗无法进入的区域。
相关文章
- 广和通携手璇玑动力,提升四足机器人复杂环境连续定位能力
- 珞石机器人举办第四届全球合作伙伴大会 发布全栈平台赋能物理AI时代
- “最萌机器人”亮相WAIC “成都造”爱湫让情感需求被看见
- 上海智位机器人亮相WAIC 2026国际人工智能教育论坛 分享科技教育全球化实践
- 全球商用服务机器人出货量头部企业擎朗智能携人形机器人亮相2026世界人工智能大会
- WAIC 2026 | 移远轮臂式具身机器人平台登场:让机器人“想明白、反应快、拿得稳“
- 让智能走进产业现场,鹿明机器人亮相WAIC 2026
- 2026世界人工智能大会开幕 “小巨人”凌雄科技AI算力业务和机器人租赁业务备受关注
- WAIC重磅首秀:了得科技携全系仿生机器人矩阵亮相,硬核全栈自研技术构筑行业核心壁垒
- 上海智位机器人亮相WAIC 2026:展示DFRobot AI智能体盒子,推动企业AI走向任务执行
- 工业和信息化部人形机器人与具身智能标准化技术委员会2026年度全体会议暨“标准周”活动在浙江绍兴召开
- 开普勒机器人CEO宋华:从实景实训出发,实现从产品落地到行业标准化普及的跨越
- 朗信电气(920220.BJ):人形机器人关节电机已批量供货,电驱动技术平台打开第二增长曲线
- 关于召开“第三届中国具身智能与人形机器人创新峰会”的通知
- AI+机器人落地充电站,汽车智能充电迈入“感知-执行”一体化时代
- 加速进化发布 Booster T2:以旗舰算力与运动能力推动人形机器人走向真实世界
AI企业
更多>>




AI硬件
更多>>AI产业
更多>>AI技术
更多>>- 全球最强开源模型 Kimi K3 发布,参数规模 3 万亿,真的是强!
- 范式变革!东软发布AI原生软件工程白皮书,重构软件产业底层逻辑
- KAT-Coder-Pro V2.5正式发布:从“写代码”迈向“做工程”,Agentic能力全面升级
- 自变量机器人王昊:训练世界模型需付出“时间税”,解决模态对齐是当务之急
- 腾讯发布CodeBuddy Security,用AI Agent实现更高效的代码审计
- Twinkle x昇腾,率先实现Deepseek-V4系列模型高效训练
- 高德发布鸿蒙首个生成式 UI 开源框架 AGenUI,告别传统 UI 开发模式
- 发布即适配| 天数智芯全力支持腾讯混元Hy3 preview 开源落地,共推国内大模型产业普惠


