机器人学会了以新的敏捷度抓取和攀爬
2019-01-17 09:18:19AI云资讯2084
机器人是令人惊奇的东西,但在他们的特定领域之外,他们是非常有限的。因此灵活性 - 不是物理的,而是心理的 - 是一个不变的研究领域。三个新的机器人设置展示了他们可以进化以适应新情况的方式:使用“双手”,摔倒后起床,以及理解他们从未见过的视觉指令。
所有独立开发的机器人今天聚集在一起专门讨论学习的科学机器人杂志的特刊。每个都展示了一种有趣的新方式,机器人可以通过这种方式改善与现实世界的互动。
另一方面…
首先是使用正确的工具来完成工作的问题。作为人类在我们手臂末端带有多用途夹具的人,我们对此非常有经验。我们从一生中感受到的东西,我们需要使用这个握把来接这个,我们需要使用工具,这将是轻的,重的,等等。
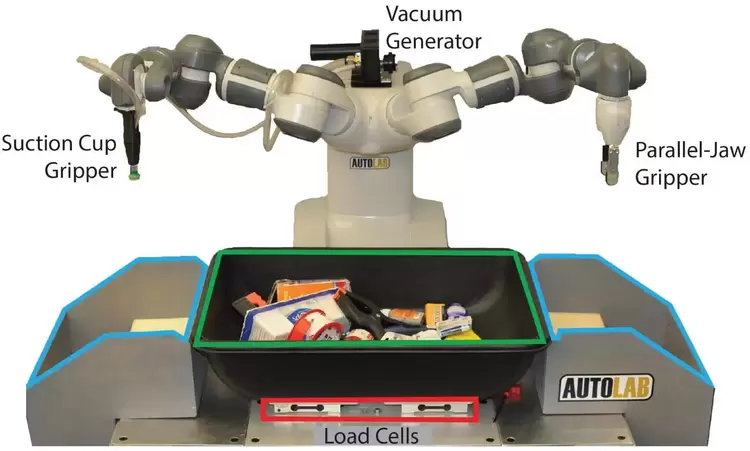
当然,机器人对此没有固有的知识,这可能会使事情变得困难;它可能无法理解它无法拾取给定大小,形状或纹理的东西。来自伯克利机器人专家的新系统可作为一个基本的决策过程,将物体分类为能够通过普通的夹钳或吸盘握把抓住。
同时挥动两者的机器人动态决定(使用基于深度的图像)要抓取哪些物品以及使用哪种工具;结果是即使在以前从未见过的成堆物体上也具有极高的可靠性。
它是通过一个神经网络完成的,该网络消耗了数百万个关于物品,安排和试图抓住它们的数据点。如果你试图拿起一个带吸盘的泰迪熊而且它在前一万次没有工作,你会继续尝试吗?该系统学会了做出这种决定,并且你可以想象这样的事情对于机器人正在整理的仓库拣选等任务来说可能非常重要。
有趣的是,由于复杂神经网络的“黑匣子”性质,很难说出究竟Dex-Net 4.0究竟是基于什么选择,尽管有一些明显的偏好,伯克利的Ken Goldberg在一封电子邮件中解释道。
“我们可以尝试推断一些直觉,但这两个网络是不可理解的,因为我们无法提取可理解的'政策',”他写道。 “我们凭经验发现,远离边缘的光滑平面表面通常在抽吸模型上得分很好,并且成对的对映点通常对于抓手来说得分很好。”
现在可靠性和多功能性很高,下一步就是速度; Goldberg表示,该团队正在“开发一种令人兴奋的新方法”,以减少网络的计算时间,毫无疑问,这将在未来的论文中记录。
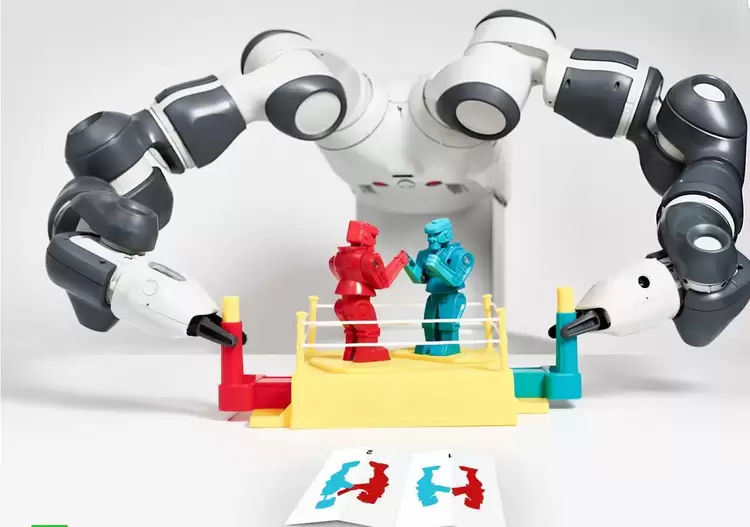
ANYmal的新技巧
Quadrupedal机器人已经具有灵活性,因为它们可以自信地处理各种地形,甚至可以从滑倒中恢复(当然还有残忍的踢腿)。但是当他们跌倒时,他们会很难受。一般来说,他们不会起床。
这些机器人配置腿的方式使得除了直立位置之外的任何事情都很难做到。但是,由苏黎世联邦理工学院(ETH Zurich)开发的机器人ANYmal(最近你可以回想起它在下水道的小旅行),它具有更多功能的设置,使其腿部具有更大的自由度。
你可以用额外的动作做什么?各种各样的事情。但要弄清楚机器人移动的最佳方式以最大化速度或稳定性是非常困难的。那么为什么不使用模拟来测试成千上万的ANYmals同时尝试不同的东西,并使用现实世界中的结果?
这种基于模拟的学习并不总是有效,因为现在不可能准确地模拟所涉及的所有物理学。但它可以产生极其新颖的行为或简化人类认为已经最佳的行为。
无论如何,这是研究人员在这里所做的,不仅是他们为机器人(上图)加快了速度,还教了一个惊人的新技巧:从摔倒起床。任何跌倒。看这个:
非常特别的是,机器人已经提出了基本上只有一种技术,可以从几乎任何可能的坠落位置站起来,只要它有足够的空间和所有腿的使用。记住,人们没有设计这个 - 模拟和进化算法通过一遍又一遍地尝试数千种不同的行为并保持有效的行为来实现它。
宜家集会是杀手级应用
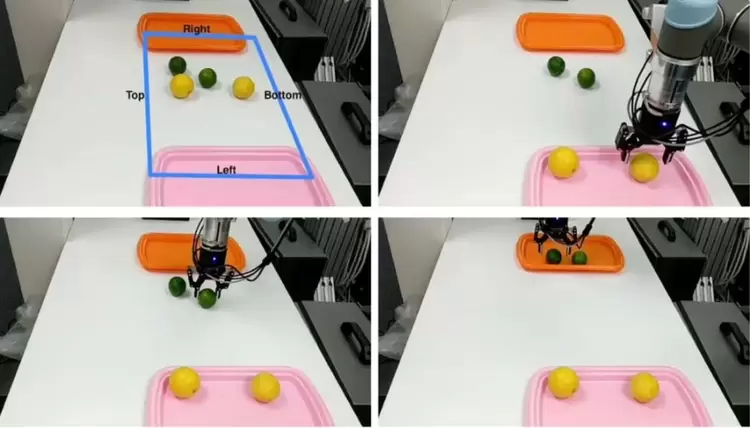
假设你有三个碗,中间有一个红色和绿色的球。然后你在一张纸上给出了这个:
作为一个有大脑的人,你可以拿这篇文章作为指示,你就会明白绿色和红色的圆圈代表那些颜色的球,红色的圆圈需要向左移动,而绿色圆圈则向右移动。
这是人类在没有意识到的情况下应用大量知识和直观理解的事情之一。你是如何决定圈子代表球的?因为形状?那为什么箭头不是指“真正的”箭头?你怎么知道向右或向左走多远?你怎么知道报纸甚至提到这些项目?您将在几分之一秒内解决的所有问题,其中任何一个问题都可能使机器人陷入困境。
研究人员采取了一些步骤,能够将上述抽象表示与现实世界联系起来,这项任务涉及大量的机器创造力或想象力。
在图中的白色背景上的绿点与现实世界中黑色背景上的绿色圆形物之间建立连接并不明显,但是MiguelLázaro-Gredilla和他的同事在Vicarious创建的“视觉认知计算机”人工智能似乎做得很好。
当然,它仍然是非常原始的,但理论上它与用于组装一件宜家家具的工具集相同:查看抽象表示,将其连接到真实世界的对象,然后根据以下方法操纵这些对象。说明。我们距离那里还有几年的历史,但是不久前我们距离机器人从跌倒中起床或决定吸盘或钳子的距离会更好。
上述所有概念的论文和视频应该可以在Science Robotics网站上找到。
相关文章
- 端午新去处!重庆DDK 机器人潮玩嘉年华 打卡拍摄出行全指南
- 涂鸦智能×乐享科技,帮助机器人真正融入智慧家庭
- 解码AI未来 2026世界制造业大会人工智能与机器人展9月启幕
- 海柔闪攀机器人双深位升级方案中国首秀!为超密存储和更高效率护航
- 上海智位机器人(DFRobot) 发布 seeMote Cap 与 seeMote Cube,帮助 Apple Vision Pro 开发者把真实工具带入 visionOS 应用
- 华为云正式启动首届具身智能大赛,汇聚力量攻克机器人应用技术瓶颈
- From AI, For AI:艾利特如何让机器人成为AI产业的“关键推动者”?
- 双奖加冕丨深度探索协作焊接能力边界,珞石机器人亮相恰佩克盛会
- 全球首个!大晓机器人推出全屋三维可交互世界模型 Kairos-HomeWorld
- 上海智位机器人(DFRobot)C4002 毫米波雷达:全数据访问模式如何解决静态人体检测难题
- 亚马逊发布Proteus智能机器人,自动化升级伴随大规模裁员潮
- 智能如厕机器人“小伴”正式发布 跃伴助力无障碍科技建设
- 从“人找马桶”到“马桶找人”:跃伴智能如厕机器人亮相老博会
- 跨越感知瓶颈!单芯片8T8R毫米波雷达如何让机器人读懂复杂世界?
- 深耕具身智能,亿达科创智能四足仿生机器人亮相沈阳机器人大会
- 炬坤机器人发布全球首款工业五指灵巧手 打破行业性能天花板
人工智能企业
更多>>





人工智能硬件
更多>>人工智能产业
更多>>人工智能技术
更多>>- 腾讯发布CodeBuddy Security,用AI Agent实现更高效的代码审计
- Twinkle x昇腾,率先实现Deepseek-V4系列模型高效训练
- 高德发布鸿蒙首个生成式 UI 开源框架 AGenUI,告别传统 UI 开发模式
- 发布即适配| 天数智芯全力支持腾讯混元Hy3 preview 开源落地,共推国内大模型产业普惠
- Seedance 2.0面向企业公测,豆包大模型日均Token使用量突破120万亿
- 端到端OCR模型第一!百度千帆Qianfan-OCR正式发布
- 云知声Unisound U1-OCR大模型发布!首个工业级文档智能基础大模型,开启OCR 3.0时代
- 基石智算上线 MiniMax M2.5,超强编程与智能体工具调用能力


