开创未来城市生活,Virtual Point·OptiTrack为自动驾驶提供技
2020-08-05 10:03:36AI云资讯903
为了使自动驾驶汽车在实际道路上安全使用,我们需要了解它们之间的相互作用。”
— 阿曼达·普罗克(Amanda Prorok)
“堵车”一直是人类交通历史上难解的题目,当“礼让”因为“赶时间”而被人们抛诸脑后,那么等待在前方的可能将会是更严重的拥堵。人们在驾驶过程中,都仅是偌大交通中小小的一员,司机之间并无沟通,如果仅靠默契,很难达到大范围内顺畅的交通流动。
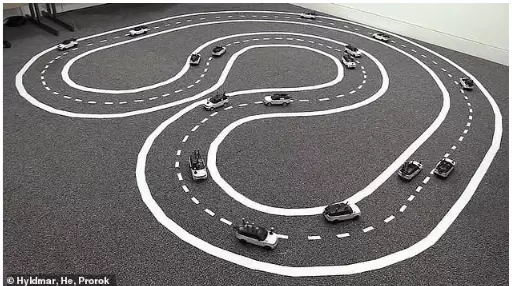
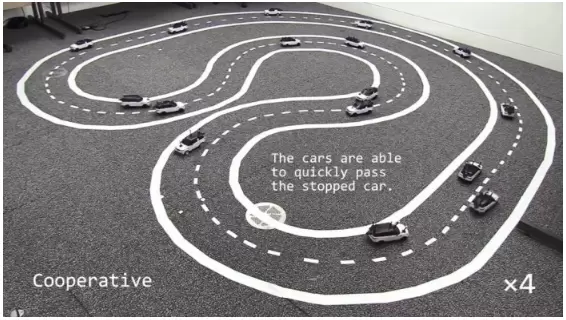
针对类似问题,来自唐宁学院和圣约翰学院的Nicholas Hyldmar、Michael He于2018年夏季在剑桥大学计算机科学与技术系Amanda Prorok的博士实验室完成了一项本科研究项目。他们对微型机器人车队进行了编程,使它们在多车道轨道上行驶,并且在不同情况下,观察了其中一辆车停下来后交通有哪些变化。
设计了此实验算法的Michael He说道:“自动驾驶汽车可以解决很多不同城市驾驶相关问题,但需要有一种方式让他们相互合作起来。”而设计了硬件部分的Nicholas Hyldmar说:“如果不同的汽车制造商都在使用自己的软件开发自己的自动驾驶汽车,那么这些汽车都需要彼此进行有效地通信。”
现有自动无人驾驶汽车测试都是通过电脑模拟进行的,常规比例模型又因太大或太昂贵而无法真正在室内实验中使用。在这项实验中,研究人员为学术研究、教育及自动驾驶多车系统的延展领域提供了一个阿克曼操作平台(Ackermann-steering platform),这是世界上少有的面向大众的设计,特别是对于具备遥测设备(如运动捕捉)的机器人实验室具有很大吸引力。
剑桥研究人员使用的是具有逼真转向系统的市售廉价比例汽车模型,这种模型可装入75 x 81 x 197毫米的盒子中,重450克(包括电池),售价76.5美元,可在3个小时内组装完成。每个汽车都是基于一个1:5的汽车底盘,并且搭载了一个含GPU的ASUSMini-ITX主板,该主板使小汽车使用车载传感器即可实现快速的自动无人驾驶,并使汽车之间可以通过wifi互相通信,知道彼此的位置。这种比例模型车尺寸大约为20cm×8cm,不仅模型成本低,而且避免了大场地实验,简化了后续运动捕捉技术的实现过程。
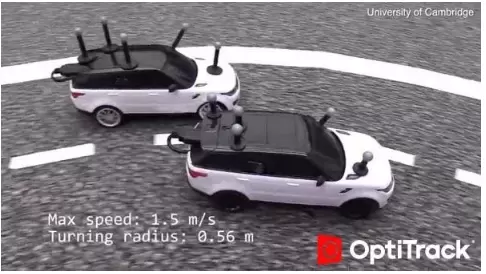
实验室使用的是OptiTrack系统,该系统基于被动式标记点(Markers),可实时提供车辆位置反馈。每一辆微型小车上都装配了五个标记点,OptiTrack系统可以实时追踪小车并且以100Hz为频率提供位姿测量。通过连续的运动信息,扩展型卡尔曼滤波器可得到每个汽车的位姿(pose)、速度以及转向角的预估值。研究人员实现了一种用于轨迹跟踪的内环和外环控制法。外环(如:轨迹规划器)生成轨迹,或使用预先计算好的轨迹(如高速公路车道)来计算速度和转向角定位点,而这定位点用于供给内环,使汽车间的位置信息互通有无。
实验过程中,我们可以看到,当汽车在彼此间信息不通的情况下驾驶,一辆汽车在一侧道路停下,此时后面的任何汽车都必须停车或减速,并等待交通间隙。这种情况其实在真实生活中频频上演,停下的汽车后面迅速形成了一个队列,最终导致总体交通流量减少,更易造成交通拥堵。
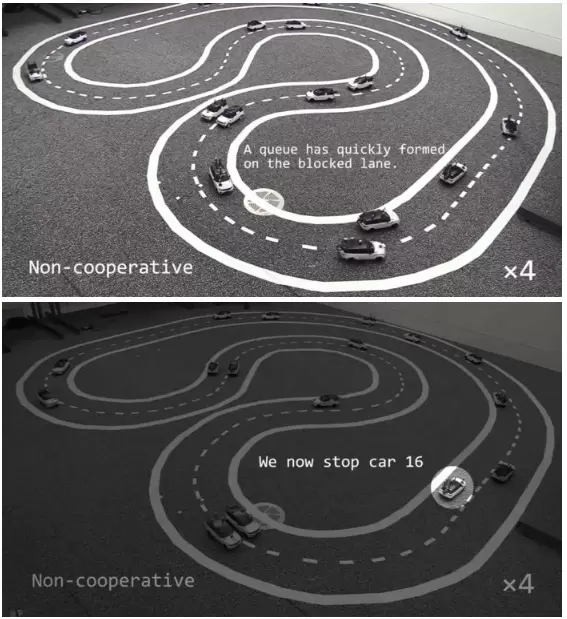
但是,当小汽车相互通信并共同驾驶时,停在内道上的车会向所有其他汽车发出信号,这时外车道的车厢收到信号就会略微减慢速度,因此内车道的车厢能够迅速绕过停靠的车而不必明显减速甚至完全停下等待。
在正常模式下,协同驾驶比不协作驾驶改善了35%的交通流量,而对于主动驾驶而言,改善了45%。
研究人员还测试了车队如何通过操纵杆对人类控制的一辆汽车做出反应——当实验者手动将汽车驶入道路、并以激进的方式行驶时,其他汽车也收到相应信号,通过减速或绕开的方式让路,避开激进的驾驶员,从而提高了安全性。
Amanda Prorok说:“我们的设计允许对自动驾驶汽车进行各种实用且低成本的实验……要使自动驾驶汽车安全地在实际道路上使用,我们需要知道它们将如何相互作用以改善安全性和交通流量。”
往后,研究人员计划在更复杂的场景中使用类似车队,进行多车系统测试,包括具有更多车道与交叉路口的道路、有更复杂驾驶表现的道路,以及呈现更多噪点感知和通讯延迟的道路。这种多目标优化问题在未来的研究实验中将一一得到设计和验证,而基于光学原理的OptiTrack运动捕捉技术也将持续为类似学术研究提供稳定的功能性支持。
相关文章
- L3上路:自动驾驶爆发前夜,MGU执行器守护最底层安全
- ASTROX全球首发,开创未来出行机器人自动驾驶新范式
- 意大利驻华大使打卡文远知行Robotaxi,点赞中国领先自动驾驶科技
- 开启实体商业“自动驾驶”时代:大吉肆龙虾智能体首发重塑盈利底层逻辑
- 特斯拉全自动驾驶功能已处于召回边缘
- 优步向Rivian投资12.5亿美元 双方达成新自动驾驶出租车协议
- 英伟达:将与比亚迪、吉利进行自动驾驶出租车业务合作
- 《运输策略蓝图》发布 百度杨楠:香港是孵化自动驾驶业务的宝地
- 酷哇发布 WAM 2.0 世界模型,加速构建“自动驾驶+机器人”RoboCity 新基建
- Waymo融资160亿美元,欲将自动驾驶出租车业务推向全球
- 自动驾驶新能源重卡赛道最大单笔融资来了!深向科技完成11.77亿元Pre-IPO轮融资
- 特斯拉在得克萨斯州奥斯汀推出无人监管的自动驾驶出租车服务
- 豪赌自动驾驶!喜相逢拟控股毫米波雷达“黑马”
- 喜相逢“杀入”上游:砸向自动驾驶的感知心脏
- 主线科技获评“2025最具投资潜力奖”,自动驾驶卡车商业化进程加速
- 英伟达CES预言自动驾驶未来,文远知行融合双技术路线领跑行业
人工智能企业
更多>>



人工智能硬件
更多>>人工智能产业
更多>>人工智能技术
更多>>- 高德发布鸿蒙首个生成式 UI 开源框架 AGenUI,告别传统 UI 开发模式
- 发布即适配| 天数智芯全力支持腾讯混元Hy3 preview 开源落地,共推国内大模型产业普惠
- Seedance 2.0面向企业公测,豆包大模型日均Token使用量突破120万亿
- 端到端OCR模型第一!百度千帆Qianfan-OCR正式发布
- 云知声Unisound U1-OCR大模型发布!首个工业级文档智能基础大模型,开启OCR 3.0时代
- 基石智算上线 MiniMax M2.5,超强编程与智能体工具调用能力
- 昇腾原生支持,科学多模态大模型Intern-S1-Pro正式发布并开源
- 百度千帆深度研究Agent登顶权威评测榜单DeepResearch Bench


