外媒消息:约翰内斯·开普勒大学研究人员研发捕蝇机器人
2020-10-08 08:48:05AI云资讯1342
马丁·卡尔滕布伦纳(MartinKaltenbrunner)说,当我们想象移动的机器(例如机器人)时,我们想象的东西很大程度上是由硬质材料制成的。他和JKU的软物质物理系以及LIT软材料实验室的研究人员一直在努力构建基于软材料的系统。创建此类系统时,存在一个基本的基本概念,即创建有利条件,以支持将来机器人与人之间的紧密交互,而不会造成坚固的机器对人的身体造成伤害。
稳定,可拉伸且灵活
6月,科学家提出了一种用于电磁电动机的新方法。代替铜线和铁,弹性材料和液体金属现在形成用于所谓的致动器的基本成分。科学家最近还在《自然材料》杂志的一篇文章中介绍了一种新型的生物凝胶,该凝胶具有足够的弹性,柔韧性和稳定性,可以与电子组件结合使用,从而创造出一种“软机器人”。
由Kaltenbrunner和DenysMakarov(位于德累斯顿-罗森多夫的亥姆霍兹中心)领导的团队现在正在进一步开发这类机器。两位研究人员指出,以前的缺点是这些无线设计的软机器人只能非常缓慢地改变形状。他们的新想法是基于使用柔性塑料聚二甲基硅氧烷并混合磁性微粒(例如钕,铁和硼的合金)。
花形机器人会在捕捉苍蝇之前暂时关闭苍蝇,然后通过在面内方波磁场(3 mT,50 Hz)驱动下打开八个臂来释放苍蝇。机械手的直径为25 mm,厚度为200 m。图片来源:Makarov等;通讯材料六臂机器人可以抓取,运输和释放非磁性物体,例如由永磁体控制的聚氨酯泡沫立方体。机械手的直径为20 mm,厚度为80 m。
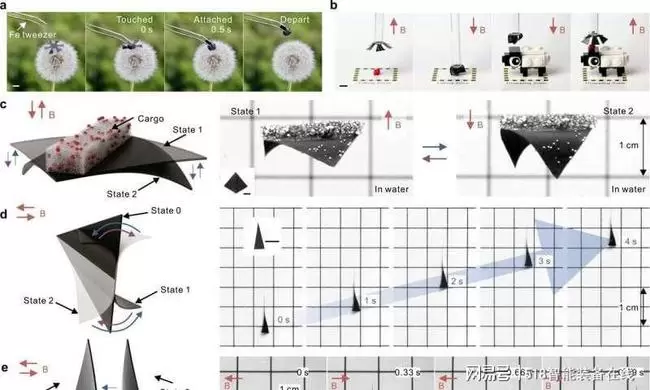
通讯材料一个四臂机器人(重量为23 mg)位于透明玻璃管中,并通过3.7 mT的平面外静态磁场使其悬浮。悬浮时,机器人被制动。当暴露于平面内方波磁场(1.5 mT,50 Hz)时,它会在空间上变形并自我配置。机械手的直径为15 mm,厚度为200 m。
研究人员给他们的小型,柔软的机器人不同的形状。根据形状,微粒放置的位置以及所用材料的厚度,当机器人暴露在环境中变化的磁场中时,它们能够以不同的方式移动。这些执行器的厚度只有几微米,重量只有几微克,因此移动所需的能量很小。此外,这些组件可以重复运动数百万次,而无需任何更改。
悬停,游泳,捉苍蝇
通过影响和改变磁场,Kaltenbrunner和他的同事成功地制造了微型机器人,它们可以盘旋,游泳和(从广义上来说)甚至可以行走。他们还表明,在短短的几毫秒内,他们的花形机器人可以捕捉到落在上面的苍蝇。
通过仿真设计,装有货物的蝠ta形机器人可以在交变面内方波磁场(2 mT,1 Hz)驱动的水中游泳。机械手的横向尺寸为17 mm×19 mm,厚度为80 m。图片来源:Makarov等;通讯材料三角形的机器人可以在空中高速滚动,并在暴露于交体地面内方波磁场(3.5 mT,1.5 Hz)的情况下向前行走。机械手的直径为18 mm,厚度为80 m。图片来源:Makarov等;通讯材料
科学家们说,这现在为开发也可以快速移动的软机器人提供了新的机会。长远的想法是主要生产更复杂的微型机器,例如,这些微型机器可以帮助疏通人体中的血管。为了做到这一点,所使用的材料必须是可生物降解的并且易于控制。
相关文章
- 加速进化发布 Booster T2:以旗舰算力与运动能力推动人形机器人走向真实世界
- 墨甲机器人亮相香港LEAP East,真实场景应用闪耀国际科技舞台
- 声网联手瑞芯微,平行操控方案落地机器人小脑芯片RK3588/3576
- 菲柯机器人战略携手影智科技,软硬双自主重塑餐饮具身智能新消费
- 两年翻倍,海康机器人第20万台移动机器人下线背后的产业加速度
- 打破末端配送壁垒,佑驾创新正式发布四轮足机器人
- 上海智位机器人(DFRobot)慕尼黑电子展分享:以供应链创新赋能智能硬件与开发者市场
- 影智XBOT战略携手亦庄机器人,以“交钥匙”级OEM方案共做具身智能时代“技术基建商”
- 机器人跳舞、沉浸式看戏!这场省级演艺盛会在余杭举行,解锁文旅新玩法
- 芯原推出CPP2000摄像头后处理IP,赋能具身机器人和移动视觉应用
- 世界模型与VLA并非对立,云迹科技单臂协作机器人如何融合两条技术路线
- 云迹科技发布单臂协作机器人,VLA架构正成为2026具身智能主航道
- 小雨智造乔忠良首提“具身红利”,三大技术发布与首款焊接机器人同步落地
- 京东与影智XBOT达成深度战略合作,共推餐饮机器人规模化普及
- 小雨智造发布首款具身智能焊接机器人,三大底层技术揭开面纱
- 中国移动携手产业合作伙伴打造业界首个5G-A具身智能人形机器人训练场及消防救援应用示范
AI企业
更多>>


AI硬件
更多>>AI产业
更多>>AI技术
更多>>- KAT-Coder-Pro V2.5正式发布:从“写代码”迈向“做工程”,Agentic能力全面升级
- 自变量机器人王昊:训练世界模型需付出“时间税”,解决模态对齐是当务之急
- 腾讯发布CodeBuddy Security,用AI Agent实现更高效的代码审计
- Twinkle x昇腾,率先实现Deepseek-V4系列模型高效训练
- 高德发布鸿蒙首个生成式 UI 开源框架 AGenUI,告别传统 UI 开发模式
- 发布即适配| 天数智芯全力支持腾讯混元Hy3 preview 开源落地,共推国内大模型产业普惠
- Seedance 2.0面向企业公测,豆包大模型日均Token使用量突破120万亿
- 端到端OCR模型第一!百度千帆Qianfan-OCR正式发布


