智行者率先推出“重感知 轻地图”技术 以技术创新推动自动驾驶商业化落地
2022-10-07 22:02:16AI云资讯1490
引言:
智行者始终认为“自动驾驶应该是任意点到任意点的驾驶”。
智行者于2018年于行业内率先提出“重感知 轻地图”的技术。
2015年后,随着人工智能技术的兴起,自动驾驶赛道风起。然而就在短短几年间,自动驾驶就经历了风口、低谷、失落等不同的状态。然而,风起风落,自动驾驶的技术始终是其发展的核心。
作为国内最早成立的自动驾驶企业之一,智行者留给行业的最大印象似乎是“低调”。但低调的智行者却也是最坚定的自动驾驶技术创新者,也是自动驾驶商业化的先行者。
技术方面,智行者不仅实现了软件+硬件+云端一体化的全栈技术自研,成为全能型自动驾驶技术供应商。同时,智行者团队还不断通过自身的专业知识及行业专识对技术发展及应用需求进行研判,实现超前的技术布局。
智行者始终认为“自动驾驶应该是任意点到任意点的驾驶”。但因为高精地图覆盖范围、鲜度等问题始终阻碍着自动驾驶的运行范围。因此,智行者于2018年于行业内率先提出“重感知 轻地图”的技术。
“重感知 轻地图” 是指不绝对依赖高精度地图,在有高精度地图时候当然可以应用,在没有高精地图存在的地方,系统构建实时高精地图供车辆完成自动驾驶动作,以减轻自动驾驶对高精地图的依赖。
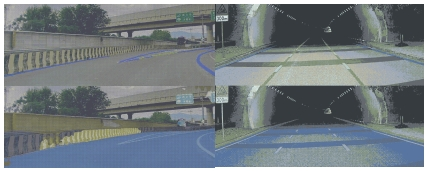
“重感知 轻地图”技术的关键在于实时建图,其中要解决几个重点问题:不同传感器信息在空间上的融合,即将所有感知系统获取的局部信息进行空间融合,以确定当前环境的全部信息(路面的语义信息);语义信息在线高精度矢量环境重建,即根据语义信息对当前环境进行“在线高精度矢量重建”,形成一张用这些矢量信息表达的局部地图,将离散的感知信息结构化;在线高精矢量重建地图定位架构,即对车辆进行定位;强交互时空联合决策规划,即根据他车轨迹模态和时空分布进行概率建模,同时充分考虑自车未来各种可能行为对他车的潜在影响,将决策问题变为他车与自车行为的联合优化问题,从而表现出与环境车辆的主动交互,同时保障车辆舒适性。

早在2018年,智行者便将“重感知 轻地图”技术应用于特种领域。智行者CEO张德兆曾在接受媒体采访时介绍到,在森林、丛林等复杂越野条件下,已经没有“路”的概念了,因此,特种车辆在应对这种场景时不需要依赖预先绘制的高精地图,才能真正实现自主的无人驾驶。“重感知 轻地图”技术不仅满足了自动驾驶技术在特种领域的应用需求,也伴随智行者多款无人特种车的规模化落地应用不断完善。
据悉,在智行者近期发布的全新L2+高级辅助驾驶系统H-INP中也采用了“重感知 轻地图”技术。这也标志着智行者多场景落地战略下,各场景之间的技术协同效应不断加强。
相关文章
- L3上路:自动驾驶爆发前夜,MGU执行器守护最底层安全
- ASTROX全球首发,开创未来出行机器人自动驾驶新范式
- 意大利驻华大使打卡文远知行Robotaxi,点赞中国领先自动驾驶科技
- 开启实体商业“自动驾驶”时代:大吉肆龙虾智能体首发重塑盈利底层逻辑
- 特斯拉全自动驾驶功能已处于召回边缘
- 优步向Rivian投资12.5亿美元 双方达成新自动驾驶出租车协议
- 英伟达:将与比亚迪、吉利进行自动驾驶出租车业务合作
- 《运输策略蓝图》发布 百度杨楠:香港是孵化自动驾驶业务的宝地
- 酷哇发布 WAM 2.0 世界模型,加速构建“自动驾驶+机器人”RoboCity 新基建
- Waymo融资160亿美元,欲将自动驾驶出租车业务推向全球
- 自动驾驶新能源重卡赛道最大单笔融资来了!深向科技完成11.77亿元Pre-IPO轮融资
- 特斯拉在得克萨斯州奥斯汀推出无人监管的自动驾驶出租车服务
- 豪赌自动驾驶!喜相逢拟控股毫米波雷达“黑马”
- 喜相逢“杀入”上游:砸向自动驾驶的感知心脏
- 主线科技获评“2025最具投资潜力奖”,自动驾驶卡车商业化进程加速
- 英伟达CES预言自动驾驶未来,文远知行融合双技术路线领跑行业
人工智能企业
更多>>




人工智能硬件
更多>>人工智能产业
更多>>人工智能技术
更多>>- 高德发布鸿蒙首个生成式 UI 开源框架 AGenUI,告别传统 UI 开发模式
- 发布即适配| 天数智芯全力支持腾讯混元Hy3 preview 开源落地,共推国内大模型产业普惠
- Seedance 2.0面向企业公测,豆包大模型日均Token使用量突破120万亿
- 端到端OCR模型第一!百度千帆Qianfan-OCR正式发布
- 云知声Unisound U1-OCR大模型发布!首个工业级文档智能基础大模型,开启OCR 3.0时代
- 基石智算上线 MiniMax M2.5,超强编程与智能体工具调用能力
- 昇腾原生支持,科学多模态大模型Intern-S1-Pro正式发布并开源
- 百度千帆深度研究Agent登顶权威评测榜单DeepResearch Bench


