rFpro在VR进行自动驾驶测试,支持导入地图模型
2019-08-14 09:21:48AI云资讯1534
8月13日,知名模拟驾驶领域的公司rFpro,近期推出了一套基于VR场景的自动驾驶训练系统。据悉,在这套软件中可以完成一系列自动驾驶模拟操作。目前,rFpro模拟驾驶系统支持导入多种格式第三方地图模型,具备HIDEF高保真度等特性。

毫无疑问,当前自动驾驶测试路测过程非常重要。而且需要现在封闭场所进行路面测试,达到一定里程后,才可以在指定的公开路面测试。这个过程中,对于自动驾驶汽车厂商而言掌握的自动驾驶数据就非常重要的了。
另一方面,rFpro技术总监Chris Hoyle表示:此前多数虚拟测试只是在光线和发光情况良好的情况下测试,而这不符合测试真正的目的,也不能测试传感器自身的限制。因为在光线不理想、或发光情况下可能会导致传感器识别错误,而对于CAV和ADAS车辆必须彻底验证传感器识别表现和特定环境识别的能力。

因此,未来的立法也会比虚拟测试场景更为严格,特别是公开路段的测试。
Chris Hoyle谈到:物理建模意味着,车辆传感器可以模拟真实遇到不同材质的物体后的表现,并不是仅仅采用抽象的测试。
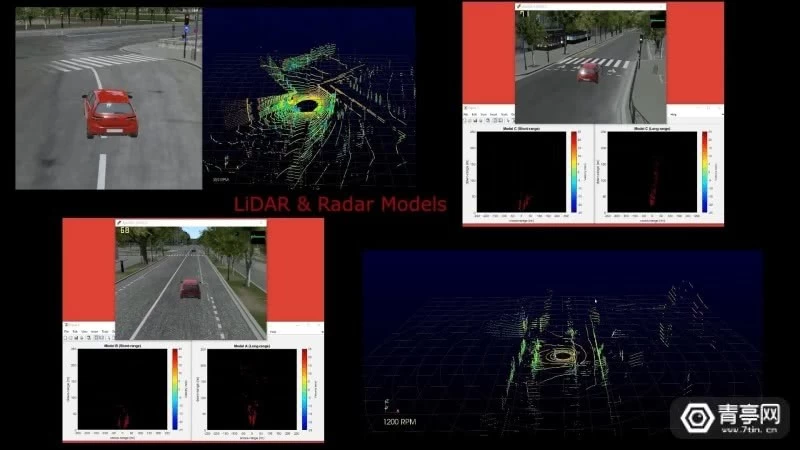
据悉,rFpro的工程师正在进一步缩小虚拟测试和真实测试之间的差距,包括采用8台4K摄像机,支持实时曝光控制和运动模糊。
相关文章
AI企业
更多>>




AI硬件
更多>>AI产业
更多>>AI技术
更多>>- 全球最强开源模型 Kimi K3 发布,参数规模 3 万亿,真的是强!
- 范式变革!东软发布AI原生软件工程白皮书,重构软件产业底层逻辑
- KAT-Coder-Pro V2.5正式发布:从“写代码”迈向“做工程”,Agentic能力全面升级
- 自变量机器人王昊:训练世界模型需付出“时间税”,解决模态对齐是当务之急
- 腾讯发布CodeBuddy Security,用AI Agent实现更高效的代码审计
- Twinkle x昇腾,率先实现Deepseek-V4系列模型高效训练
- 高德发布鸿蒙首个生成式 UI 开源框架 AGenUI,告别传统 UI 开发模式
- 发布即适配| 天数智芯全力支持腾讯混元Hy3 preview 开源落地,共推国内大模型产业普惠


