自变量机器人王昊:训练世界模型需付出“时间税”,解决模态对齐是当务之急
2026/06/15 16:48AI云资讯22306
近日,2026北京智源大会召开。世界模型作为具身智能模型的最新范式,论坛吸引了广泛关注。自变量机器人联合创始人兼CTO王昊,分享了“事件驱动的世界模型”的前沿成果。
王昊表示,所有的智能都是在特定尺度下涌现出来的。需要找到不同模态各自表示的尺度,加上规模化,最终才能通向多模态基础模型。

过去在大语言模型上存在着“对齐税”,与之类似,目前训练世界模型的方式也需要付出“时间税”,这是以固定长度定义世界预测长度的弊端。
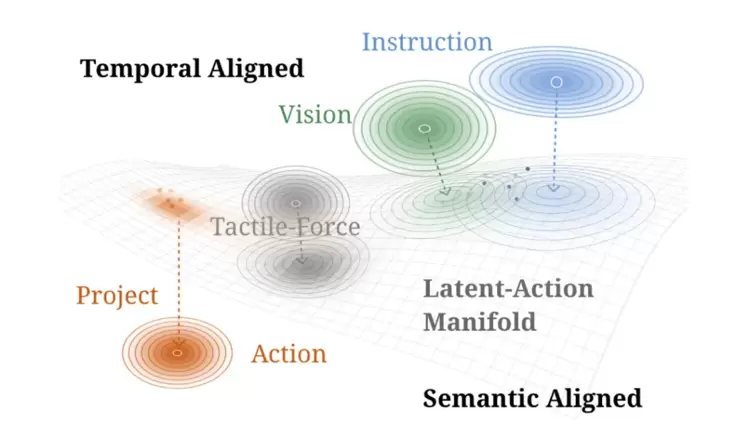
自变量近期发布的“事件级”世界模型WALL-WM,则使用以事件为边界拆分数据的方法,实现语言、视觉和动作的更好的对齐。自变量发现,事件是连接语言、视觉和动作的天然尺度:事件是基于语言表达,因此边界清晰;视觉也由事件分割,同一事件内的动作更容易预测。“以事件为尺度做变长分割,能够实现对三个模态的天然统一。”王昊表示。
以事件为数据边界训练的世界模型WALL-WM,也在多个测试上都取得了出色效果:
具身视频生成方面,在运动质量、语义一致性和物理合理性上,都超过WAN 2.1 / WAN 2.2;在隐式3D感知和多视角一致性上,全面优于目前开源视觉模型
;在真机测试方面,在基础任务、推理任务、灵巧任务、泛化任务等四大类操作评测benchmark上,分数大幅超过π 0.5、DreamZero。
据公开信息,自变量机器人是国内最早采用完全端到端路径,实现通用具身智能大模型的公司之一。其近期开源的VLA模型Wall-OSS-0.5,实现了在自研本体上部分任务仅需预训练、无需后训练,就能接近过去后训练微调后的零样本泛化水平。开源的数采方案XRZero-G0 则构建起一套软硬一体的全身无本体数采与训练系统,能将数据采集成本降低到过去的1/20。
相关文章
- AI识蚊+纯物理诱捕 中科中成“铁蜻蜓”智能灭蚊机器人重新定义绿色防控
- 越疆机器人全球出货量第一:为何成为具身智能头部企业第一梯队
- 强强联合拓特种机器人赛道!七腾机器人与京东达成深度战略合作
- 谷歌 DeepMind 推出新一代 AI 模型,能够操控机器人的全身躯体
- 具身视觉大脑闪耀WAIC2026|桐识科技以“光算一体”技术赋能机器人全场景感知
- OpenAI总裁:将为 AI 聊天机器人打造全系硬件产品矩阵
- 上海智位机器人seeMote Cube海外正式开售:为visionOS应用带来运动控制、实体按键与触觉反馈
- 南凌科技签约智能机器人制造企业
- 心言机器人创始人任永亮在2026 WAIC提出“心理世界模型”
- 第三次递表背后,斯坦德机器人交出前四月营收增长139.1%的成绩单
- CMES华机展|天津国际工业自动化及机器人展
- CMES华机展|东莞国际工业自动化及机器人展
- 零次方机器人与商汤善惠达成深度战略合作,探索具身零售规模化落地
- 扎根硬核场景,璇玑动力以全栈自研开辟四足机器人落地新路径
- 不用跑半年市场!郑州这场人工智能应用与机器人博览会,承包你全年产业链资源
- 杭叉集团举办首届AI DAY科技日 正式发布LogiMind具身大模型与全系列叉车机器人
AI企业
更多>>




AI硬件
更多>>AI产业
更多>>AI技术
更多>>- 全球最强开源模型 Kimi K3 发布,参数规模 3 万亿,真的是强!
- 范式变革!东软发布AI原生软件工程白皮书,重构软件产业底层逻辑
- KAT-Coder-Pro V2.5正式发布:从“写代码”迈向“做工程”,Agentic能力全面升级
- 自变量机器人王昊:训练世界模型需付出“时间税”,解决模态对齐是当务之急
- 腾讯发布CodeBuddy Security,用AI Agent实现更高效的代码审计
- Twinkle x昇腾,率先实现Deepseek-V4系列模型高效训练
- 高德发布鸿蒙首个生成式 UI 开源框架 AGenUI,告别传统 UI 开发模式
- 发布即适配| 天数智芯全力支持腾讯混元Hy3 preview 开源落地,共推国内大模型产业普惠


