为超百家具身智能企业提供核心零部件,「知行机器人」连续完成两轮近亿元融资
2026-03-27 15:55:55AI云资讯3017
灵巧手及具身智能机器人产品提供商知行机器人科技(苏州)有限公司(以下简称「知行机器人」)近期完成近亿元B轮融资。本轮融资由上市公司山东威达领投,国兴投资、芜湖科创、天泓投资、西安经发、臻泰投资和上海天使会跟投,翊荣资本担任长期独家财务顾问,资金将主要用于产品研发、数据采集以及全球市场拓展。
知行机器人成立于2018年,致力于机器人灵巧手、电动夹爪、旋转和线性执行器以及具身智能机器人系统解决方案的研发与生产,是国家高新技术企业、江苏省专精特新企业,目前已推出智能手全系列产品矩阵,负载能力覆盖0.1kg至150kg,是国内产品谱系最全的末端执行器厂商之一。

公司创始人兼CTO白国超博士深耕机器人手领域18年,拥有英国赫里奥特-瓦特大学哲学博士、北邮/伦敦国王学院联合培养工学博士、加拿大蒙特利尔大学博士后及帝国理工学院研究员背景,曾师从多位海内外机器人领域专家学者。
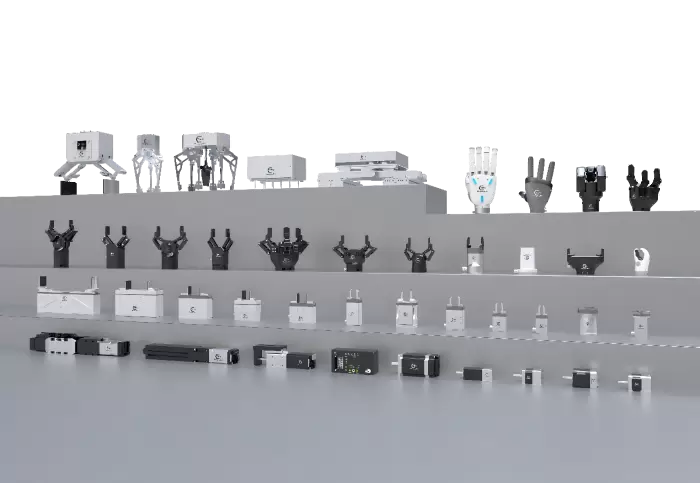
1.搭建全品类产品矩阵,从“手”向“身体”延伸
末端执行器是具身

机器人完成作业的“最后一厘米”,也是最复杂的硬件模块之一。针对不同应用场景对成本、负载和精度的差异化需求,知行机器人长期坚持技术底座共用与场景精准适配相结合的原则,搭建全品类产品矩阵,两指或三指手用于高度结构化的工业场景,高仿生功能的五指手则服务于随机性较强的非结构化场景。
2025年下半年,知行机器人推出采用连杆机构加一体化伺服方案的四指灵巧手“灵思手”。该产品拥有12个关节、8个主动自由度,抓握负载5kg,主要用于物流分拣、工业搬运等工业场景。其驱控一体设计简化了外部接线,具有响应速度快与重复定位精度高的优点,并易于集成到协作机器人或工业机械臂上。

「知行机器人」灵思手
2026年初发布的五指绳驱动灵巧手“束巧手”则代表了另一条技术路径,采用仿生绳驱结构,拥有16个关节,11个主动自由度,运动轨迹可超越人手。束巧手的核心创新点还在于可以实现左右手自适应切换——同一只手可同时采集左右手操作数据,将数据采集成本降低一半,并显著提升算法的训练泛化性,目前已应用于航空航天、科研教育及医疗康复等高端服务场景。

「知行机器人」束巧手
相比于业内同类型厂商,知行机器人在硬件方案上的技术优势,一方面在于搭载了自研的欠驱动机构、可重构机构及柔性自适应机构,自适应抓取方案已获多项发明专利;另一方面,其自研的驱控一体伺服系统,减少了外部接线,可以提高机器人手产品可靠性,尤其适用于微小型夹爪的狭小空间。
在核心部件基础上,知行机器人也推出了双臂协同具身智能机器人平台。该平台双臂协同负载30kg,臂展850mm,垂直作业范围0~2200mm,三维环境感知精度达±0.1mm,可搭配灵思手或束巧手产品执行重载搬运与精细操作任务。

「知行机器人」机器人平台
白国超博士表示,从机器人手部件向整机的延伸是公司“核心部件+行业解决方案”双轮驱动战略的必然选择:“要真正解决航空发动机维修、电力设备操作这类复杂问题,必须理解手、臂、眼、脑如何协同。做整机不是为了和本体厂商竞争,而是更好地定义和迭代灵巧手产品。”
2.做工业级核心部件,为头部具身机器人供货
“一些近两年成立的初创企业,往往是先做出手的产品,再去找可以落地的场景,我们是先找好场景,再定义手的设计。”白国超介绍,知行机器人在早期首先切入航空航天、重载物流、电力设备等高技术壁垒领域,不断积累和打磨硬件产品能力。
比如在航空发动机叶片精密称重、分拣和脉动装配拆解等场景中,知行机器人沉淀了大量行业专属的高质量数据集,再利用这些数据反哺模型训练,进一步赋能产品实现更泛化的操作能力,从而形成硬件、算法与应用的正向循环。
“相比于表演娱乐场景,工业场景对机器人手的稳定性和可靠性要求高,几乎不允许出错。”白国超表示,知行机器人的产品在交付前均经过严苛的寿命测试,例如用于数据采集和预训练模型的“数采手”,可实现500万次以上使用次数,是行业平均水平百倍以上。而基于长期在供应链领域的积累,知行机器人产品价格仅为同类产品一半左右。
凭借“工业级品质+性价比”的组合优势,知行机器人在2025年已实现数千套产品的批量出货,订单收入近亿元,并成为智元机器人、腾讯、华为、智平方、睿尔曼智能等企业数据采集配套硬件产品的独家或核心供应商。
“过去我们主要在驱动控制算法等硬件方面做持续深耕,现在更多关注驱动控制的集成,底层算法的迭代与数据闭环。”白国超博士表示,目前知行机器人已形成从数据采集硬件、行业数据采集到具身智能机器人本体的数据闭环能力。他认为,当行业进入规模化应用阶段,数据将成为比硬件本身更深的护城河:“谁能在真实场景中跑通数据闭环,谁就能在下一阶段的竞争中占据先机。”
除了量产产品与数据采集业务的持续发展,2026年,知行机器人还将推出高自由度的微型手指关节模组,夯实核心技术底座。考虑到机器人数据集与预训练模型对优化触觉感知能力的需要,知行机器人也将推出带视触觉感知功能的灵巧手产品,以此在核心通用操作能力上实现技术突破。
“目前灵巧手在通用操作能力方面的进展仍然非常缓慢,包括特斯拉的Optimus也在做持续开发。在硬件层面,难点在于高自由度、高可靠性、输出力和控制精度的优化,以及机器人手是否具有高分辨率的感知能力,并且能够实现与大脑的协同。基于我们在国内的产业链和技术开发效率优势,我觉得还是有能力解决这方面的一些难点。”白国超博士表示。
相关文章
- 重磅发布!MUNIK秒尼科参编的两项物流机器人国家标准正式落地
- 安徽硅启智元与美国Seegrid达成数据战略合作,共拓工业自主移动机器人新场景
- 有怡科技闪耀2026杭州国际机器人展会 荣获“智躯·整机标杆奖”
- 有怡科技三大核心优势 重塑通用人形机器人行业标准
- 京东五金城发布618战报 工业机器人及关键模组成交额同比增长超10倍
- 让实体工具对话空间计算,上海智位机器人 seeMote系列为Apple Vision Pro带来空间外设操控方案
- 博银合创亮相 Bosch Connected World 2026,展示工业具身智能机器人全栈解决方案
- 让科技走进日常,启元推动个人机器人迈进大众消费市场
- 越疆将发布下一代陪伴交互AI人形机器人,以自研大模型重新定义家庭具身智能
- 定义移动新范式丨思岚科技正式发布Poseidon系列机器人移动底盘
- 丰疆智能正式递交港股 IPO 申请 全球化智能机器人赛道再启新篇
- 自主识别 智能搬运 有怡科技全尺寸轮式人形机器人打通物流拣选“最后一环”
- 自变量机器人王昊:训练世界模型需付出“时间税”,解决模态对齐是当务之急
- 上海智位机器人正式加入鸿蒙生态,Mind+适配鸿蒙PC共推人工智能教育普及
- 大晓机器人完成天使+轮融资,已累计融资数亿美元
- 巅峰加冕|RoBoLeague机器人足球联赛全国争霸赛光谷收官,总冠军诞生!
人工智能企业
更多>>





人工智能硬件
更多>>人工智能产业
更多>>人工智能技术
更多>>- 自变量机器人王昊:训练世界模型需付出“时间税”,解决模态对齐是当务之急
- 腾讯发布CodeBuddy Security,用AI Agent实现更高效的代码审计
- Twinkle x昇腾,率先实现Deepseek-V4系列模型高效训练
- 高德发布鸿蒙首个生成式 UI 开源框架 AGenUI,告别传统 UI 开发模式
- 发布即适配| 天数智芯全力支持腾讯混元Hy3 preview 开源落地,共推国内大模型产业普惠
- Seedance 2.0面向企业公测,豆包大模型日均Token使用量突破120万亿
- 端到端OCR模型第一!百度千帆Qianfan-OCR正式发布
- 云知声Unisound U1-OCR大模型发布!首个工业级文档智能基础大模型,开启OCR 3.0时代


