镭神智能创新升级车载激光雷达灰尘过滤算法,为智能驾驶安全护航
2023-08-18 17:02:45AI云资讯1745
激光雷达在不同应用场景,诉求其实也各不相同。尤其在汽车行业,通过使用安装在车辆上的激光雷达来全面了解周围环境,更看重激光雷达的环境适应能力。

矿区灰尘

雨天行驶(图源网络)
汽车在面临灰尘、雨雾天的情况下,均无法稳定可靠的工作,比如在多尘道路上或者矿区内行驶时扬起的灰尘,或是在雨雾天时,都容易造成激光雷达检测能力下降或者输出汽车、机器人不需要的干扰点云,这个时候对激光雷达的可靠性又多了一份考验。

镭神智能针对汽车、机器人等在行驶和运营环境中遇到的灰尘及雨雾问题,将扬尘及雨雾特性与点云算法进行大量的对比实验计算,形成一套激光雷达灰尘、雨雾过滤的算法。结合实际应用场景需求,不断进行多次的优化与提升,算法与数据学习突破盲点,解决无法识别灰尘过滤后的后方目标和感知精度问题,提升运行效率、稳定数据和安全性,最终取得突破性成果。

此套算法可应用于镭神智能任意一款激光雷达上,目前已在车规级混合固态激光雷达CH128X1和多线机械式激光雷达C16/32上完成测试及应用,使其具备灰尘、雨雾识别过滤的特点。
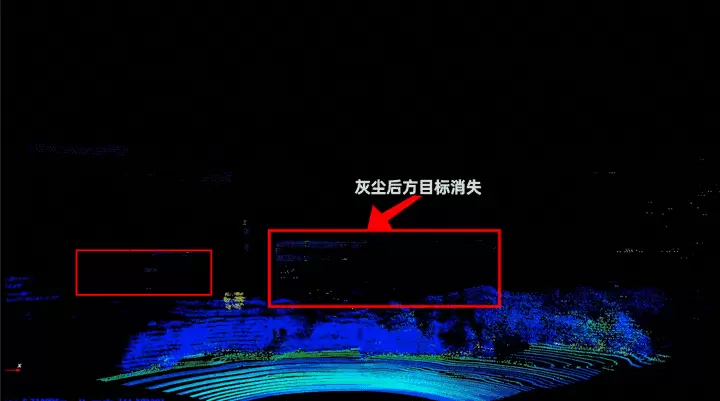
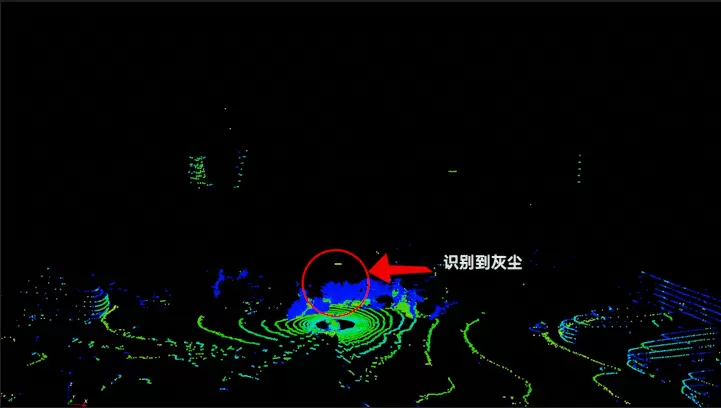
图1 CH128X1灰尘过滤功能优化前
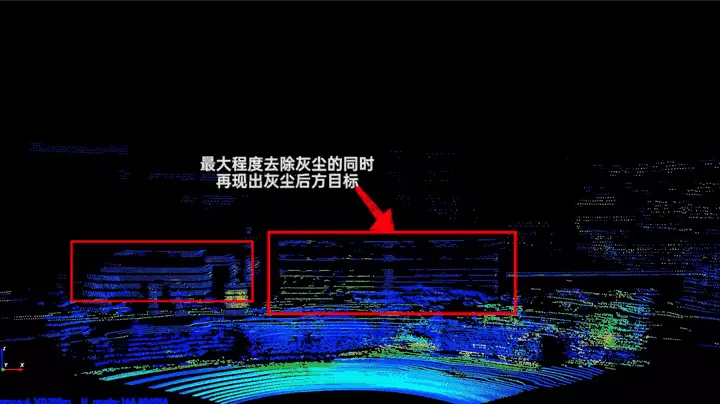
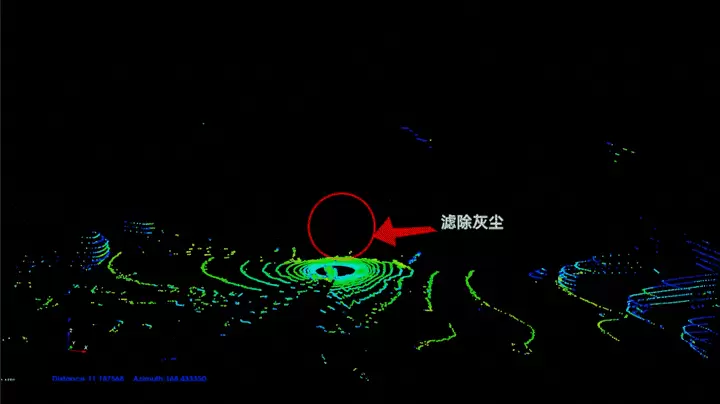
图2 CH128X1灰尘过滤功能优化后
从图1-2中可以看到车规级混合固态激光雷达CH128X1周遭或前方已经有很多灰尘,但就激光雷达CH128X1实际点云数据显示来看,在灰尘点云大幅度减少的同时,还能穿透浓厚灰尘,检测到后方的目标。
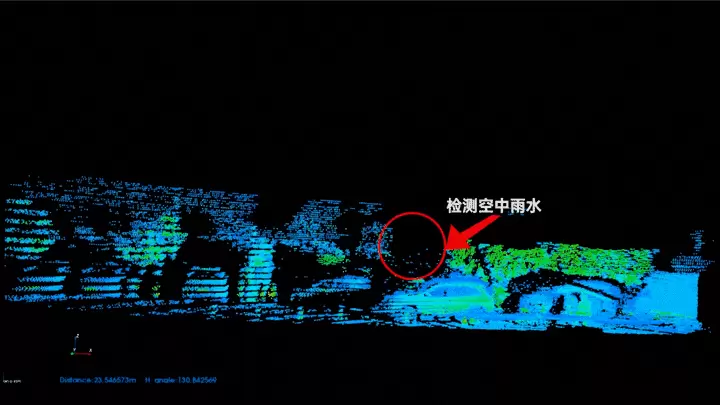
图3雨水过滤功能优化前
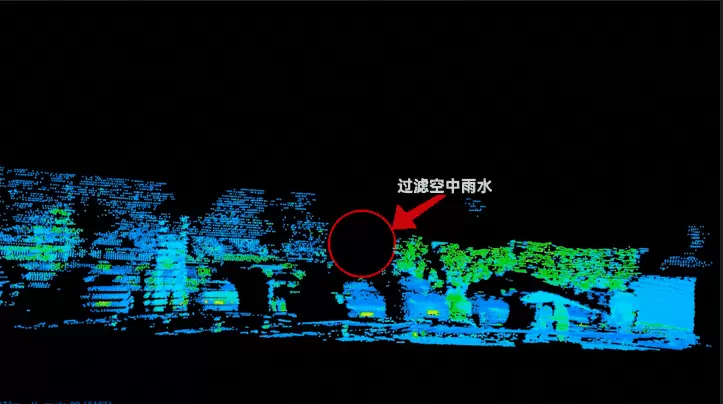
图4雨水过滤功能优化后
图3-4在下雨时,密集雨水的散点,会被当作障碍物,阻碍车辆或机器人的运动路线,在雷达去除雨水散点,可减轻上位机的数据处理负担。由此可见,CH128X1感知更精准,灵敏度更高。

镭神智能多线机械式激光雷达C16/C32进行4.0改革升级,探测精度更高、探测点云更稳定、抗光干扰能力更强。另外,对灰尘、雨雾进行反复测试,具备灰尘识别过滤的效果,感知性能再上新台阶。
C16/C32 灰尘过滤功能优化前
C16/C32 灰尘过滤功能优化后
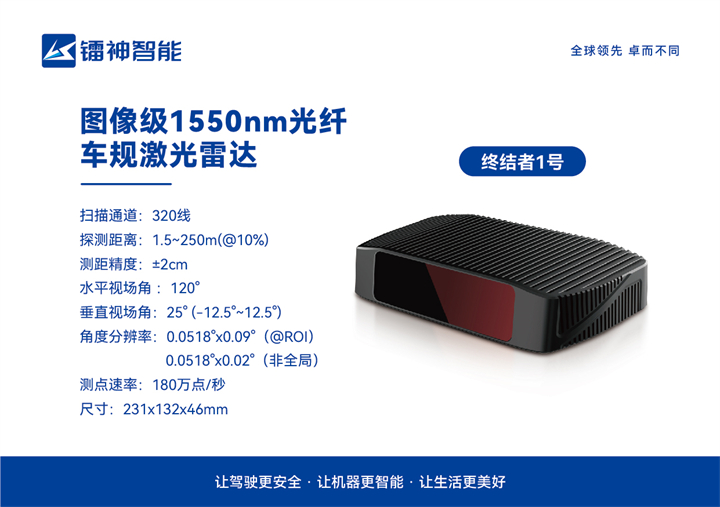
此外,本套算法还可应用在终结者系列1550nm光纤车规激光雷达及CX系列905nm车规混合固态激光雷达,保障智能汽车在雨雾、多尘等恶劣环境下也能安全行驶,践行“让驾驶更安全”的企业使命。


镭神智能作为一家全球领先的全场景激光雷达及整体解决方案提供商,秉承“让驾驶更安全、让机器更智能、让生活更美好”的企业使命,助力智能驾驶汽车更安全可靠。
相关文章
- 以场景定义技术,喜相逢探索智能驾驶商业化落地新路径
- 覆盖海内外车型,佑驾创新获13亿智能驾驶大单
- 从“物理堆叠”到“化学反应”:喜相逢以多模态融合重塑智能驾驶感知生态
- 告别供应链“拿来主义”:喜相逢收购旷时,开启智能驾驶“定义硬件”新时代
- 中科摇橹船自研空间智能相机 破解汽车智能驾驶感知难题
- 11月交付超4万、累计破20万!元戎启行成智能驾驶量产“黑马”
- 万马科技与百度阿波罗智能驾驶 “技术+市场”深度合作 打造无人驾驶商业化新方案
- 可城可野,智在从容!新版上市的猛士M817 Max+如何用长续航和智能驾驶重新定义出行自由
- 宝马携手Momenta 合力打造智能驾驶辅助“中国方案”
- 华为联合发布《汽车智能驾驶技术及产业发展白皮书》,首绘智能驾驶产业全景图
- 四维图新亮相第三届智能驾驶创新大会
- 6月杭州智驾感知产业链集结!博世I大陆I安波福I法雷奥I奔驰I大众I路特斯齐聚论剑!EAC智能驾驶与具身智能大会暨展即将硬核揭秘!
- 地平线获全球首张 ISO 8800 道路车辆人工智能安全认证,树立智能驾驶系统开发全球新标杆
- Nullmax将携全栈智能驾驶解决方案亮相2025上海车展
- 长安汽车与腾讯合作再深化,共建智能驾驶数据闭环
- “基础设施+高阶服务”推动智驾跃迁,华为云智能驾驶用户大会成功举办
人工智能企业
更多>>

人工智能硬件
更多>>人工智能产业
更多>>人工智能技术
更多>>- 自变量机器人王昊:训练世界模型需付出“时间税”,解决模态对齐是当务之急
- 腾讯发布CodeBuddy Security,用AI Agent实现更高效的代码审计
- Twinkle x昇腾,率先实现Deepseek-V4系列模型高效训练
- 高德发布鸿蒙首个生成式 UI 开源框架 AGenUI,告别传统 UI 开发模式
- 发布即适配| 天数智芯全力支持腾讯混元Hy3 preview 开源落地,共推国内大模型产业普惠
- Seedance 2.0面向企业公测,豆包大模型日均Token使用量突破120万亿
- 端到端OCR模型第一!百度千帆Qianfan-OCR正式发布
- 云知声Unisound U1-OCR大模型发布!首个工业级文档智能基础大模型,开启OCR 3.0时代


