From AI, For AI:艾利特如何让机器人成为AI产业的“关键推动者”?
2026/06/08 16:41AI云资讯18374
过去十年,机器人行业经历了多个技术周期。从协作机器人到复合机器人,从移动操作到具身智能,从工业自动化到大模型驱动的智能体,行业不断寻找一个核心答案:机器人究竟如何创造持续价值?
艾利特机器人的答案是:不是单纯追求更强的模型,也不是单纯追求更像人的形态,而是在真实场景中建立“模型—本体—场景”的持续闭环。
艾利特从2016年提出“智能工人”理念开始,到今天构建“一脑多形”体系,再到聚焦AI产业链场景,始终坚持同一条技术路线:让机器人真正进入生产系统,并持续创造价值。
今天,伴随AI产业进入基础设施建设周期,艾利特进一步提出新的产业理念:From AI, For AI。利用AI赋能机器人,再让机器人服务AI产业的发展。
这不仅是一个产品方向,更是一个产业飞轮。

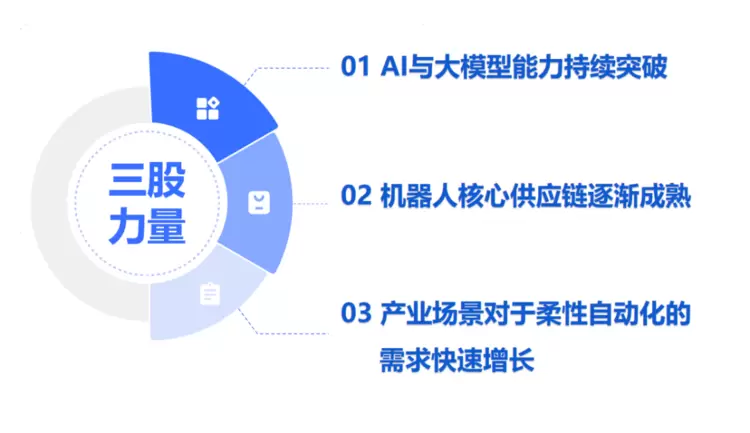
当前具身智能机器人产业正在受到三股力量推动。但艾利特机器人认为,仅有技术突破并不足以构成产业闭环。如果只有模型,没有真实场景数据,模型难以持续进化;如果只有机器人本体,没有明确应用场景,本体很容易停留在Demo阶段;如果只有场景,没有智能能力,则难以实现规模化复制。
真正决定产业落地的核心,是模型、本体与场景的协同进化。因此,艾利特机器人从一开始就选择了一条不同的路:从场景出发,再回到场景中去。不是寻找某一种“终极机器人”,而是构建能够持续迭代的智能系统。


很多人问:你们把具身智能机器人第一个落地场景选在哪里?艾利特机器人的答案是:AI产业链。
聚焦三大核心方向:
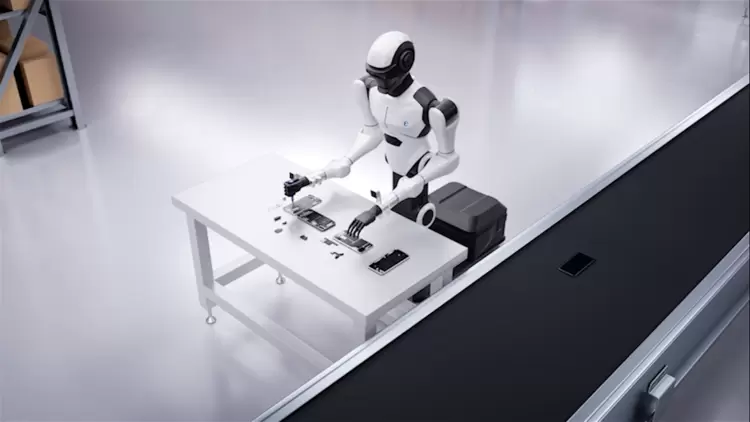
●AI Terminal(人工智能终端):智能手机、穿戴设备、智能载具的生产环节,果链产线组装检测、3C制造等。
● AI for Science(人工智能赋能科学):科研与生物制药领域的实验室自动化,样品高通量处理。
● AI Infra(人工智能基础设施):光模块制造与组装检测、AI算力核心零部件的生产、大型服务器机房的制造与维护。
为此,艾利特机器人基于业务发展的实质提出:
From AI, For AI
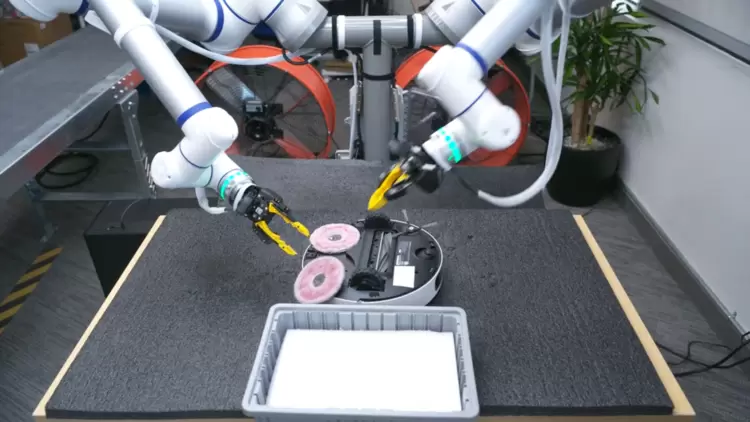
●From AI:用AI大模型为不同形态的机器人赋能,让它们更聪明。可应对反光零件、动态光照、密集堆叠等复杂场景;
●For AI:让这些机器人去服务AI基础设施的产线,生产出光模块、光通信器件——这些硬件支撑着AI算力的扩张。
●闭环:AI算力的扩容,反过来产生更多数据和算力,用于机器人大模型的迭代进化。
这一闭环带来的另一重关键价值是商业上的“沿途造血”:艾利特机器人并非将研发与商业割裂,待技术完全成熟后再寻找场景,而是依托真实场景中持续产生的订单与数据,构建通向高阶智能的进化飞轮。
具身智能,不再只是AI的“物理载体”,而是成为AI产业底层基建的关键推动者。这个闭环一旦形成,机器人技术的迭代与AI算力的扩张将产生共振——这是艾利特最想构建的产业壁垒。
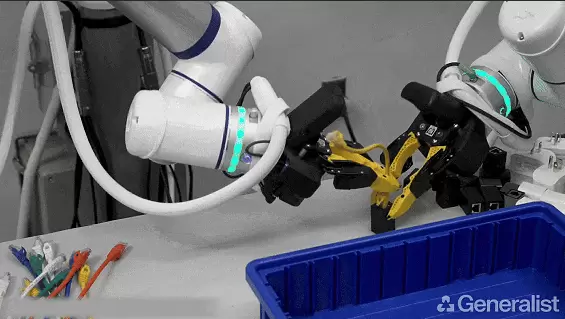
值得一提的是,美国AI机器人公司Generalist AI发布具身基础模型GEN-1时,曾选用艾利特机器人作为硬件平台,在真实环境中完成数据采集与算法验证。这从侧面印证:稳定、可靠、具备高性能通信和操作能力的机器人本体,仍是模型能力进入物理世界的重要基础。

艾利特机器人的“一脑多形”,并非追逐具身智能热潮的应景概念,也非人形机器人升温后的临时叙事。它的起点,可以追溯到2016年——艾利特创立之初。那时,艾利特机器人这支出身于北航的创业团队,提出了一个在今天看来颇具前瞻性的概念,叫“智能工人”。
当时“具身智能”尚未成为高频词,大模型也远未进入机器人产业的核心叙事。但艾利特机器人却已在思考接近其底层框架的问题:
●问题一:机器人如何识别不同产品的形状、位姿与形变?
●问题二:机器人如何根据环境与工艺变化自适应调整路径?
●问题三:机器人如何通过力感知乃至触觉,实现更自然的人机交互?
2018年,艾利特机器人董事长兼CEO曹宇男博士在接受高工机器人采访时进一步明确:“机械和运动控制是基础支撑,视觉与AI才是让“智能工人”真正实用化的内核与灵魂。这就是“一脑多型”战略的雏形。”
所谓“一脑多形”,并非简单增加几类产品,而是以统一的智能中枢驱动协作机器人、复合机器人、轮式人形机器人等不同形态,并在场景中依托高质量数据持续进化。“脑”指向感知、理解、决策、学习与执行等核心能力;“形”则是这些能力在不同场景中的载体。
在商业化早期,协作机器人因工程化程度更高、切入点更清晰,成为艾利特率先收敛与落地的方向。这也决定了艾利特的具身智能路线并非从零开始,而是沿着既有能力自然延展:从单臂到双臂,从固定部署到移动作业,从专用设备到类人系统。形态在丰富,底层能力始终相通。
艾利特从不相信某一种形态能通吃所有场景。“一脑多形”的本质,是让智能化能力跨形态通用,而非造出一个全能的“变形金刚”。


真正加速这一路径的,是外部条件的成熟。艾利特具身智能事业部负责人吴珉博士将其概括为“时候到了”:
●技术拐点:具身智能从实验室Demo走向工程化,任务理解、推理、模仿学习能力持续提升;
●产品价值显现:传统机器人需针对单一任务开发编程,而具身智能则能以一套系统通过少量微调覆盖多任务,实现跨场景迁移;
●数据与场景闭环形成:模型只是基础,决定迭代速度的是能否持续获取真实场景数据并转化为“燃料”。
在此背景下,艾利特将“一脑多形”战略具象为三条增长曲线:
第一增长曲线:协作机器人
作为“第一形”,已落地500+真实场景,近日还助力GEN-1任务成功率突破99%。产品覆盖汽车、3C、医疗、新零售等行业。产品谱系持续拓宽,业务稳健成长。
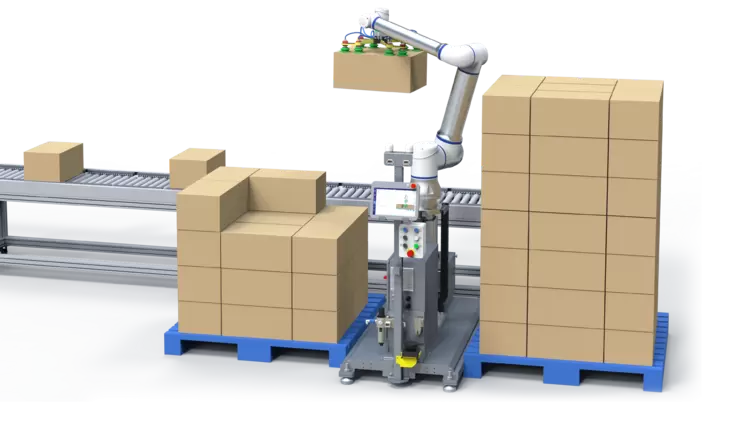
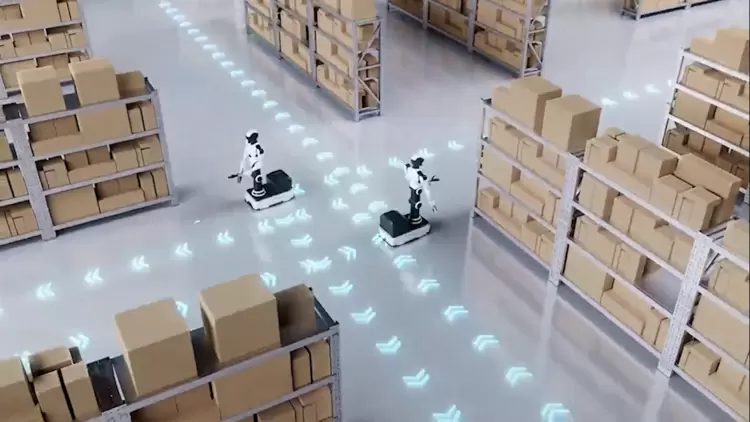
第二增长曲线:复合机器人
2021年成立专项组进行技术预研;2022年起为AI产业链头部客户提供可移动的“手眼脚”协同方案,实现规模化部署。覆盖光模块、服务器、头部果链主链企业等,深度嵌入AI产业链核心企业,完成从“项目型交付”迈向“平台型部署”,真正开启具身智能的产业级进化。

艾利特机器人在蓝思- iPhone 中框生产线车间
图源:苹果官方、《21世纪经济报道》
第三增长曲线:具身智能机器人
以轮式人形机器人为起点,未来将走向服务、消费乃至家庭场景。

从工业底座到未来生活,三条曲线并非简单替代,而是层层递进、共享同一套大脑与核心技术。


在“一脑多型”体系中,“脑”的发挥离不开大模型能力的支撑。2025年,艾利特发布自研具身大模型;2026年5月21日,正式发布“元启 Primo”。“元启”寓意“智能的元初开启”——真正的智能源于场景、数据与本体的持续闭环。
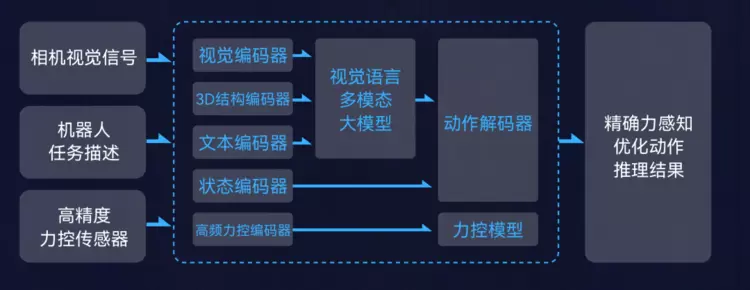
技术架构上,艾利特机器人采用自研的“VLA+T”模型架构:在视觉-语言-动作(VLA)通用大模型框架中,融入实时力矩感知与高精度力控优化能力。其中,VLA大模型负责高层语义理解、任务分解与泛化决策;T模块作为紧密耦合的专用能力层,确保操作的精细度与安全性。
值得一提的是,艾利特机器人的世界模型并非通用互联网数据驱动,而是构建于真实工业场景——在多家AI产业链头部客户现场进行强化学习与微调,使模型能够自动生成面向AI基础设施、科学智能及智能终端生产等核心场景的决策与操作能力。
这套架构的显著优势在于算力经济性:系统仅激活当前任务相关模块,整体参数规模与计算负载远低于通用大模型,更适合工业现场的实时运行与边缘部署。
艾利特不迷信“万能大模型”,也不追求模型参数的军备竞赛。用最贴近场景的真实数据和最经济的算力,实现最可靠的效果——这是艾利特机器人从研发第一天起就坚持的原则。

当“大脑”具备跨形态复用能力,且“身体”完成长期工程化积累,新形态便自然浮现。艾利特人形机器人命名为CentaurG1——源自古希腊神话中的“半人马”,兼具马的移动运载能力与人的精细操作能力。
为何选择轮式而非足式?
答案很简单:工业场景不需要踢足球,需要的是稳定、负载与经济性。轮式底盘更稳定、负载能力更高,企业可将几乎全部算力与硬件成本集中于“上半身”的操作精度与智能。当前业内共识是:在结构化环境中,轮式为最优解。
艾利特也密切关注足式技术,未来若进入居家等非结构化地面场景,足式形态必将补位。但眼下,先让机器人在工厂里创造看得见的价值。
CentaurG1的核心能力:
●多模态感知:融合激光雷达、RGBD相机、微距相机与六维力传感器,应对反光零件、动态光照、密集堆叠等复杂场景;
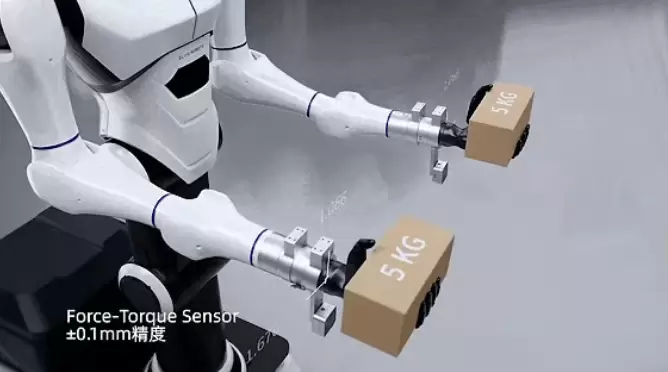
●双臂协同:7自由度冗余机械臂,单臂负载5kg,双臂协同负载10kg,重复定位精度±0.1mm;自研双臂协同规划算法,实现微力感知与柔顺装配;
●空间智能:支持精细化建图,高节拍站点导航精度达±0.01m,全向移动,动态环境自适应路径规划。
以上能力并非静态配置,而是通过真实场景数据持续反哺世界模型,使CentaurG1在每一次部署中实现操作效率与适应性的代际进化。
目前,CentaurG1正处于与客户联合验证阶段。艾利特短期不追求运动或传感性能的极致,唯一目标是:在一个真实场景中跑通闭环,证明人形机器人可以干活。


艾利特凭什么能跑通具身智能的闭环?
三个要素缺一不可:
●场景:艾利特积累了500+工业场景的落地经验和真实客户数据。
●形态:协作臂、复合机器人、轮式人形等多品类机器人的研发与量产基础,绝非半年能组装。
●AI:近年引进顶尖人才,在模型与算法上快速追赶。
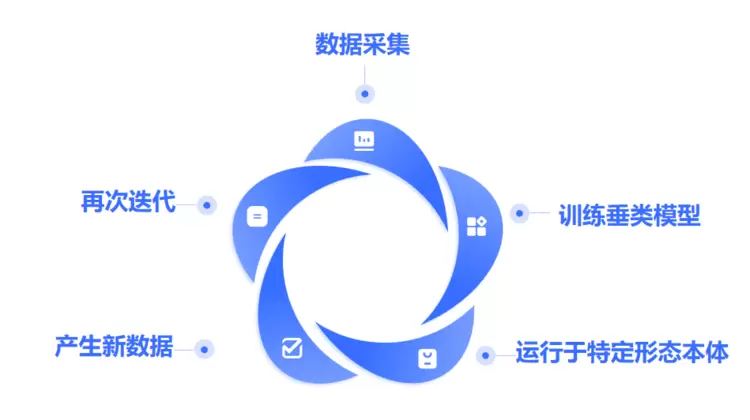
艾利特机器人不追求单一能力的极致,而是坚持“数据采集→训练垂类模型 → 运行于特定形态本体→产生新数据→再次迭代”的闭环”。这个闭环一旦跑通,产品性能将持续提升。


当“一脑多型”从战略概念走向产品验证,艾利特接下来要回答的现实问题是:具身智能还能拓展到哪些传统机器人难以覆盖的新场景?吴珉博士认为,工业和商业场景仍是最现实的试验场:
机会首先出现在三类任务:
●高接触任务(装配、插拔等):需与零件、工具、设备直接接触,对力控要求高;
●柔性搬运及延伸任务:物料形态、摆放位置、操作流程更不固定;
●长程任务:多步骤组成,需机器人判断状态、切换流程、处理异常。
这些任务的共同点是不确定性与交互性更强,也正是在这类场景中,具身智能有机会体现出相较于传统机器人的增量价值。但从能力展示走向稳定落地,中间仍然隔着很长一段距离。
“具身智能不是一个单点的技术问题,它还是一个系统工程。”吴珉博士指出,当前行业中,有的公司模型能力强,有的本体能力突出,但真正进入真实场景后,最终考验的是系统级能力:模型、本体、控制、传感、数据、场景适配、工程交付……链路越长,木桶效应越明显,任何一块短板都可能限制整个系统的上限。
因此,单看本体、模型或数据,都难以构成完整壁垒。真正能穿越周期的企业,必须同时具备:可持续迭代的智能系统、可靠的机器人本体与执行能力、真实场景中的部署与交付能力。艾利特正在构建的,正是这种系统能力。


不久前,艾利特机器人正式完成6亿元人民币D+轮融资,核心投向正是“一脑多型”战略。
资本之外,自研具身大模型“元启 Primo”已推进到具体客户现场进行试点验证,从技术与商业两端同步推进:一方面检验系统的稳定性、任务完成度与现场适应能力;另一方面探索合适的合作模式与商业闭环。
在具身智能的热潮中,艾利特见过太多炫目的Demo与宏大的叙事。“半年攒出一台人形”成为谈资,“通用大模型”被寄予一键解决所有问题的厚望。但当喧嚣褪去,产业终将回到一个朴素的问题:这台机器人在真实的产线里,到底能不能干活?
艾利特的答案可能不够性感,但我们相信它是正确的——不追求单一形态的极致仿人,不迷信通用大模型的万能解法,而是用十年时间,一步一个脚印地走通“从场景中来,到场景中去”的闭环。
艾利特没有路径依赖,不是学模型出身就迷信模型,也不是学电机出身就固守本体。正因如此,艾利特才能真正围绕场景闭环,持续进化——形态可换、模型可迭代、能力可迁移,唯一不变的是从真实场景中创造价值的决心。
从2016年“智能工人”的构想,到2026年轮式人形机器人的推出,十年时间,艾利特始终沿着“一脑多型”的清晰路线稳步扩展。
对艾利特而言,“一脑多型”不只是一种战略口号,更是一种面向未来的产品方法论:用可复用的智能能力,适配不同形态的机器人;用真实场景中的持续迭代,推动机器人从自动化设备走向具身智能体。
这条路,艾利特已经走了十年,并将继续走下去。
相关文章
- 越疆机器人全球出货量第一:为何成为具身智能头部企业第一梯队
- 强强联合拓特种机器人赛道!七腾机器人与京东达成深度战略合作
- 谷歌 DeepMind 推出新一代 AI 模型,能够操控机器人的全身躯体
- 具身视觉大脑闪耀WAIC2026|桐识科技以“光算一体”技术赋能机器人全场景感知
- OpenAI总裁:将为 AI 聊天机器人打造全系硬件产品矩阵
- 上海智位机器人seeMote Cube海外正式开售:为visionOS应用带来运动控制、实体按键与触觉反馈
- 南凌科技签约智能机器人制造企业
- 心言机器人创始人任永亮在2026 WAIC提出“心理世界模型”
- 第三次递表背后,斯坦德机器人交出前四月营收增长139.1%的成绩单
- CMES华机展|天津国际工业自动化及机器人展
- CMES华机展|东莞国际工业自动化及机器人展
- 零次方机器人与商汤善惠达成深度战略合作,探索具身零售规模化落地
- 扎根硬核场景,璇玑动力以全栈自研开辟四足机器人落地新路径
- 不用跑半年市场!郑州这场人工智能应用与机器人博览会,承包你全年产业链资源
- 杭叉集团举办首届AI DAY科技日 正式发布LogiMind具身大模型与全系列叉车机器人
- 魔芋AI机器人商用落地,蛋鸡智慧养殖迈入AI检测时代
AI企业
更多>>




AI硬件
更多>>AI产业
更多>>AI技术
更多>>- 全球最强开源模型 Kimi K3 发布,参数规模 3 万亿,真的是强!
- 范式变革!东软发布AI原生软件工程白皮书,重构软件产业底层逻辑
- KAT-Coder-Pro V2.5正式发布:从“写代码”迈向“做工程”,Agentic能力全面升级
- 自变量机器人王昊:训练世界模型需付出“时间税”,解决模态对齐是当务之急
- 腾讯发布CodeBuddy Security,用AI Agent实现更高效的代码审计
- Twinkle x昇腾,率先实现Deepseek-V4系列模型高效训练
- 高德发布鸿蒙首个生成式 UI 开源框架 AGenUI,告别传统 UI 开发模式
- 发布即适配| 天数智芯全力支持腾讯混元Hy3 preview 开源落地,共推国内大模型产业普惠


