阿里达摩院其自研感知算法实现了对低线束LiDAR的高线束模拟
2020/09/04 11:36AI云资讯10829
近日,阿里巴巴达摩院宣布,其自研感知算法实现了对低线束LiDAR(激光雷达)的高线束模拟,间接将LiDAR线束量提升3倍以上,实现低成本普通激光雷达替代高成本雷达。能探测障碍物的激光雷达是自动驾驶车辆最重要的“眼”,该算法突破相当于用“低像素相机拍出单反相机效果”,可大幅降低自动驾驶感知部件成本。
在自动驾驶实际落地场景中,需要高密度的LiDAR才能满足感知需求,而64线以上LiDAR 成本居高不下,成为自动驾驶大规模商业化瓶颈之一。达摩院自动驾驶实验室环境感知算法能结合摄像头图像,对低线束LiDAR点云进行深度补全及语义识别,实现更稠密的激光雷达点云图3D重建效果,不仅可更精确地读取障碍物距离及形状等信息,也可更精准判断其类别信息。
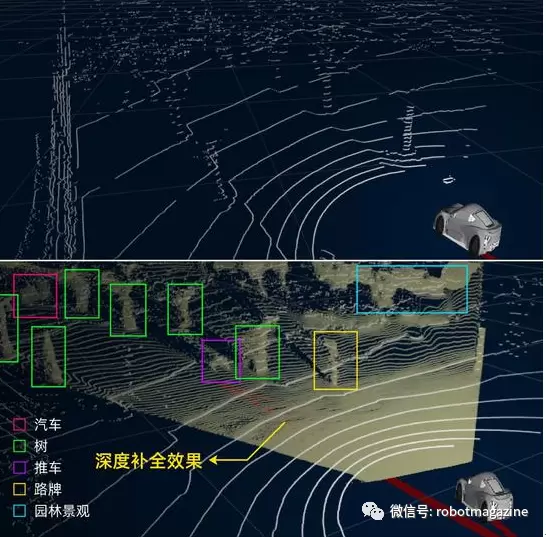
上图为低线束LiDAR原始点云,下图为经达摩院算法深度补全后的点云,LiDAR线束量提升了3倍以上,且自动驾驶车辆更好辨别出了障碍物。
在精度指标上,达摩院采用低线束激光雷达输入,实现了业内采用高线束激光雷达输入的平均水平,50m内障碍物距离信息读取平均误差为25cm左右,同时,达摩院进行深度补全任务时可达到100fps(每秒传输帧数)的处理能力。
相关文章
- 阿里系20余款应用在鸿蒙端落地50+创新体验:让每一个生活场景更智能、更轻松
- 以太之心牵手华为、阿里、三大运营商等 WAIC上共发智能体倡议
- 魔法原子签约阿里速卖通,WAIC 2026开幕首日宣布独家战略合作
- 苹果智能在国内获批,将集成阿里通义千问AI生态
- 从ALink到SNPO:阿里云定义行业首款ScaleUp铜光兼容NPO模块
- 阿里云发布AgentTeams与AgentLoop:破解企业智能体规模化落地两大难题
- 阿里云百炼推出Agentic RAG服务,让AI的知识检索和回答更精准
- 中国企业创新盘点——同时入选《财富》中国科技50强的联想集团与华为、腾讯、阿里
- 天猫618收官,阿里妈妈AI万相响应超30亿次投放决策,百万商家智赢增长
- 阿里MuleRun上线Pages数据库模式,零门槛交付可管理真实数据的完整网页
- 牧原携手阿里云共建养猪大模型 AI赋能传统产业升级
- 阿里MuleRun上线多任务模式,打造永久留存、独立交互的Agent团队
- 阿里云发布AI视频创作平台“万镜一刻”,打通短漫剧和营销视频生成全流程
- 2026智能眼镜“百镜争鸣”,谷歌/阿里/微美全息引领AR/XR产业全面升级
- 阿里云发布Token-Watt八大前沿课题,推动共建算电协同新业态
- 福客AI获阿里战略投资,持续加码电商数字生产力建设
AI企业
更多>>




AI硬件
更多>>AI产业
更多>>AI技术
更多>>- 全球最强开源模型 Kimi K3 发布,参数规模 3 万亿,真的是强!
- 范式变革!东软发布AI原生软件工程白皮书,重构软件产业底层逻辑
- KAT-Coder-Pro V2.5正式发布:从“写代码”迈向“做工程”,Agentic能力全面升级
- 自变量机器人王昊:训练世界模型需付出“时间税”,解决模态对齐是当务之急
- 腾讯发布CodeBuddy Security,用AI Agent实现更高效的代码审计
- Twinkle x昇腾,率先实现Deepseek-V4系列模型高效训练
- 高德发布鸿蒙首个生成式 UI 开源框架 AGenUI,告别传统 UI 开发模式
- 发布即适配| 天数智芯全力支持腾讯混元Hy3 preview 开源落地,共推国内大模型产业普惠


