麻省理工学院的研究人员正在试验机器人手臂来玩Jenga
2019/01/31 08:56AI云资讯11414
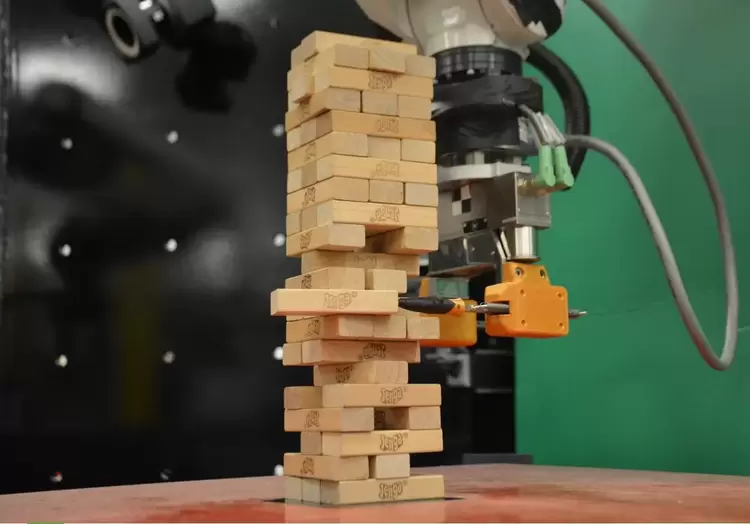
原来训练机器人手臂玩Jenga是一项令人惊讶的复杂任务。可以说,有许多活动部件。麻省理工学院的研究人员正在使用改进的ABB IRB 120与熟悉的桌面游戏一起工作,利用柔软的抓手,力感应腕关节和外部摄像头设计一个机器人,可以移除一个块而不会倒塌塔。
这个机器人经过300次尝试而不是传统上需要的数千次训练,学习将不同的尝试聚集成一组,作为一种类似于人类自我教学的简写。每次尝试时,机器人都会推动该块,测试触觉反馈以确定它是否是安全的赌注。
“与更纯粹的认知任务或象棋或围棋等游戏不同,玩Jenga游戏还需要掌握物理技能,如探测,推动,拉动,放置和对齐棋子。麻省理工学院助理教授阿尔贝托罗德里格兹说,这需要互动的感知和操纵,你必须去触摸塔,以了解如何以及何时移动街区。 “这很难模拟,所以机器人必须通过与真正的Jenga塔相互作用来学习现实世界。关键的挑战是通过利用关于物体和物理的常识来从相对少量的实验中学习。“
机器人已经相当擅长尝试,但团队很快就注意到它还没有准备好接受有经验的玩家。除此之外,机器人无法确定可能破坏塔楼即将到来的转弯强度的战略区块。
相关文章
AI企业
更多>>



AI硬件
更多>>AI产业
更多>>AI技术
更多>>- 全球最强开源模型 Kimi K3 发布,参数规模 3 万亿,真的是强!
- 范式变革!东软发布AI原生软件工程白皮书,重构软件产业底层逻辑
- KAT-Coder-Pro V2.5正式发布:从“写代码”迈向“做工程”,Agentic能力全面升级
- 自变量机器人王昊:训练世界模型需付出“时间税”,解决模态对齐是当务之急
- 腾讯发布CodeBuddy Security,用AI Agent实现更高效的代码审计
- Twinkle x昇腾,率先实现Deepseek-V4系列模型高效训练
- 高德发布鸿蒙首个生成式 UI 开源框架 AGenUI,告别传统 UI 开发模式
- 发布即适配| 天数智芯全力支持腾讯混元Hy3 preview 开源落地,共推国内大模型产业普惠


